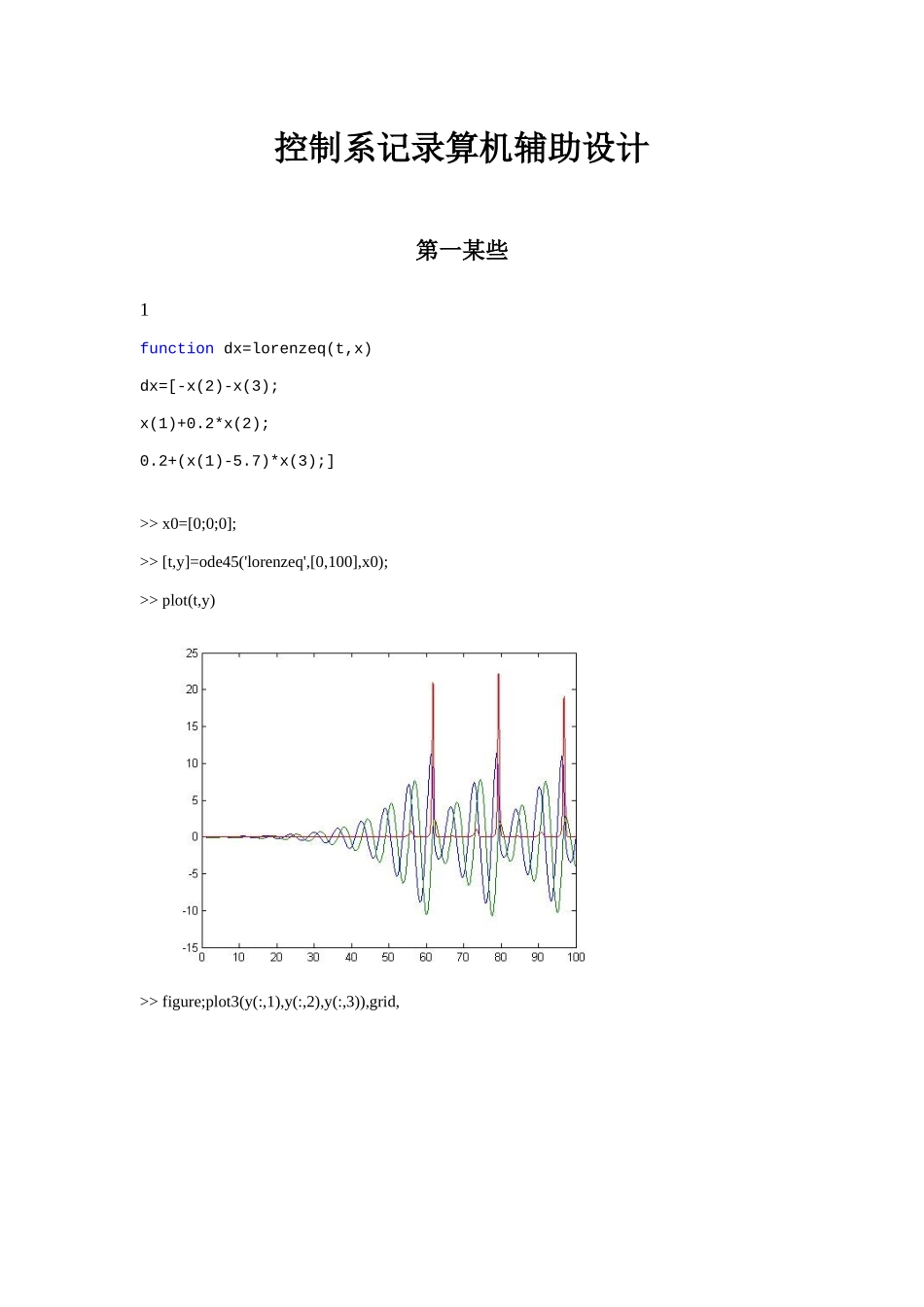
控制系记录算机辅助设计第一某些1 function dx=lorenzeq(t,x)dx=[-x(2)-x(3);x(1)+0
2*x(2);0
2+(x(1)-5
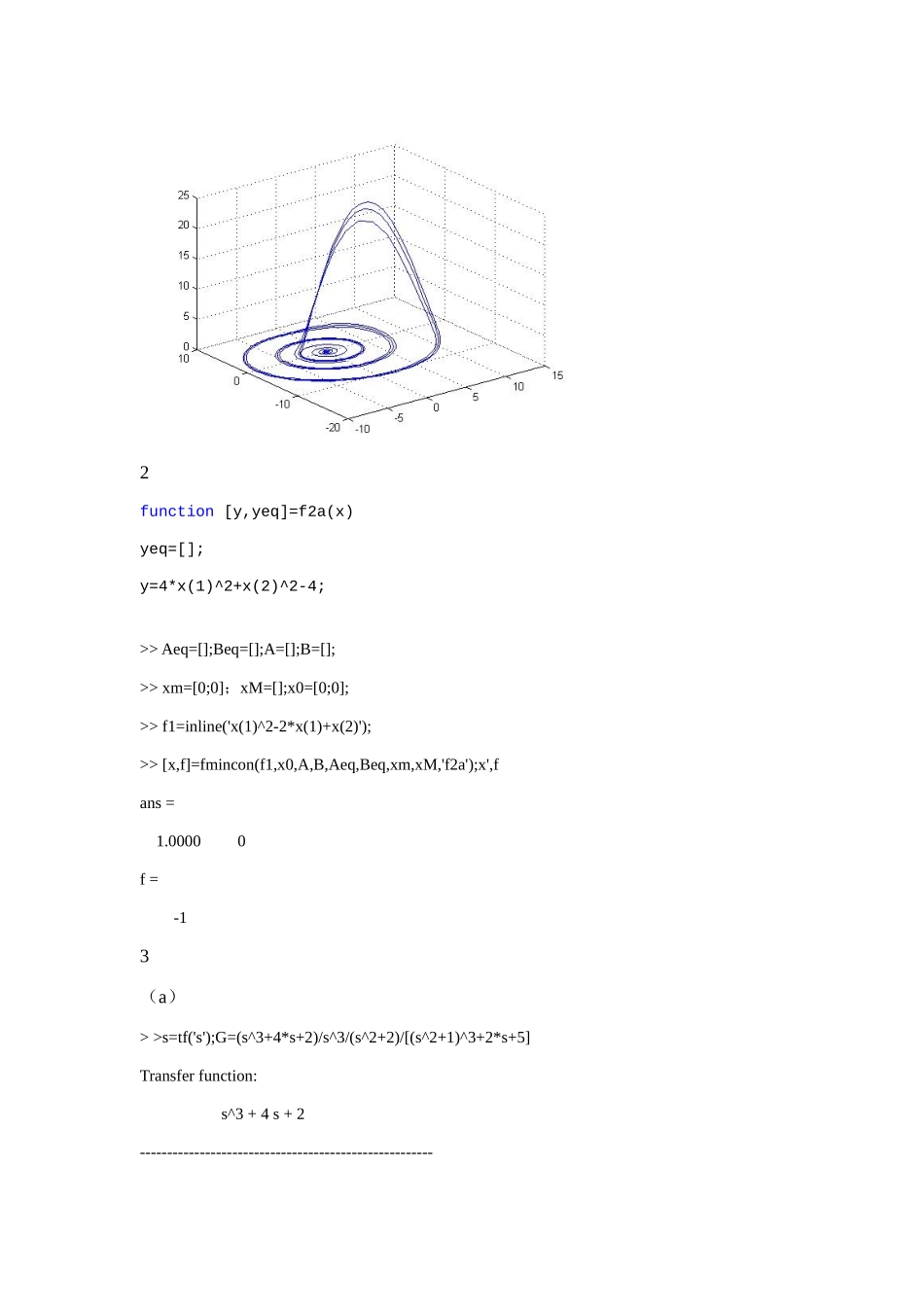
7)*x(3);]>> x0=[0;0;0];>> [t,y]=ode45('lorenzeq',[0,100],x0);>> plot(t,y)>> figure;plot3(y(:,1),y(:,2),y(:,3)),grid,2function [y,yeq]=f2a(x)yeq=[];y=4*x(1)^2+x(2)^2-4;>> Aeq=[];Beq=[];A=[];B=[];>> xm=[0;0];xM=[];x0=[0;0];>> f1=inline('x(1)^2-2*x(1)+x(2)');>> [x,f]=fmincon(f1,x0,A,B,Aeq,Beq,xm,xM,'f2a');x',fans = 1
0000 0f =-13(a)> >s=tf('s');G=(s^3+4*s+2)/s^3/(s^2+2)/[(s^2+1)^3+2*s+5]Transfer function: s^3 + 4 s + 2------------------------------------------------------s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3(b)>> z=tf('z',0
1);>> H=(z^2+0
568)/(z-1)/(z^2-0
99)Transfer function: z^2 + 0
568-----------------------------z^3 - 1
2 z^2 + 1