清华大学自动驾驶汽车合作方案清华大学计算机系一、目标1、搭建无人驾驶技术车辆平台和测试平台,测试无人驾驶技术的性能,并研发相应的集成技术解决方案
2、开发一款自动驾驶车原理样车,能够在指定道路环境中,自动驾驶到达目的地,行驶过程中可实现车道保持,避开碰撞,跟车行驶,换道超车等功能;3、协助车企组建自动驾驶汽车团队,培训相关技术人员二、实现功能1、车道保持功能:在前方没有车辆干扰情况下,没有人工干预的情况下,保持在同一个车道中间稳定行驶
2、自动变道超车功能:前方车辆车速过慢,本车主动变道超车,超车平稳
3、Stop&GO 主动巡航控制功能:在车辆行驶中,与前车保持安全距离行驶,速度不高于道路限速,在前方车辆突然减速时,可以执行减速,刹车操作,避开出现事故
在前方车辆重新起步时,本车随之自动起步
4、十字路口自动转向功能:在十字路口根据红绿灯状态、路径规划数据、前方车辆信息自动启停、转向
5、自动路径规划、导航、定位功能:根据高精度地图信息,自动规划出一条最优行驶路径,并精确定位车辆在导航中的位置
6、停止线、红绿灯、车站等定点停车;到达指定停车区域时,停车等待,满足启动条件时,起步行驶
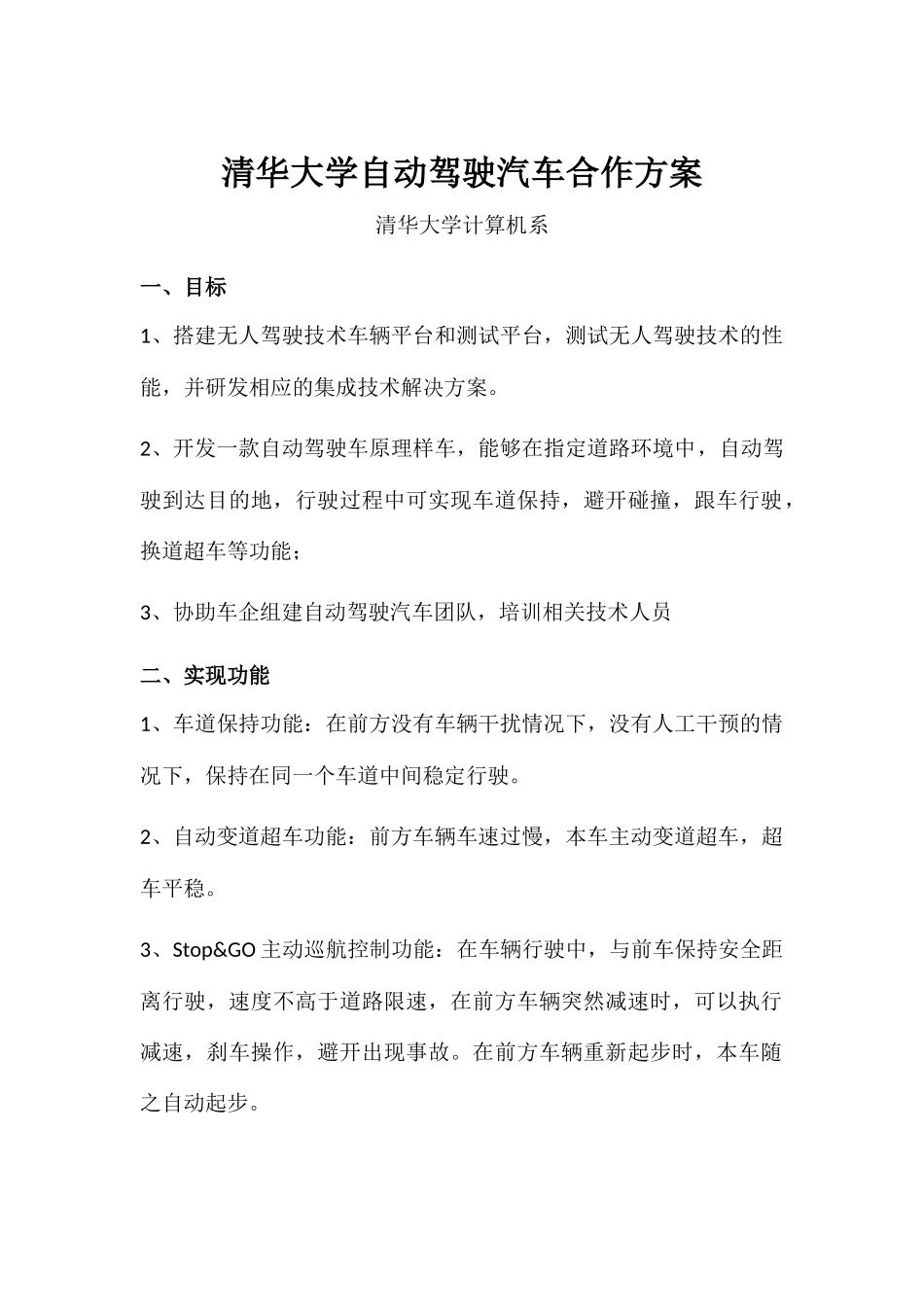
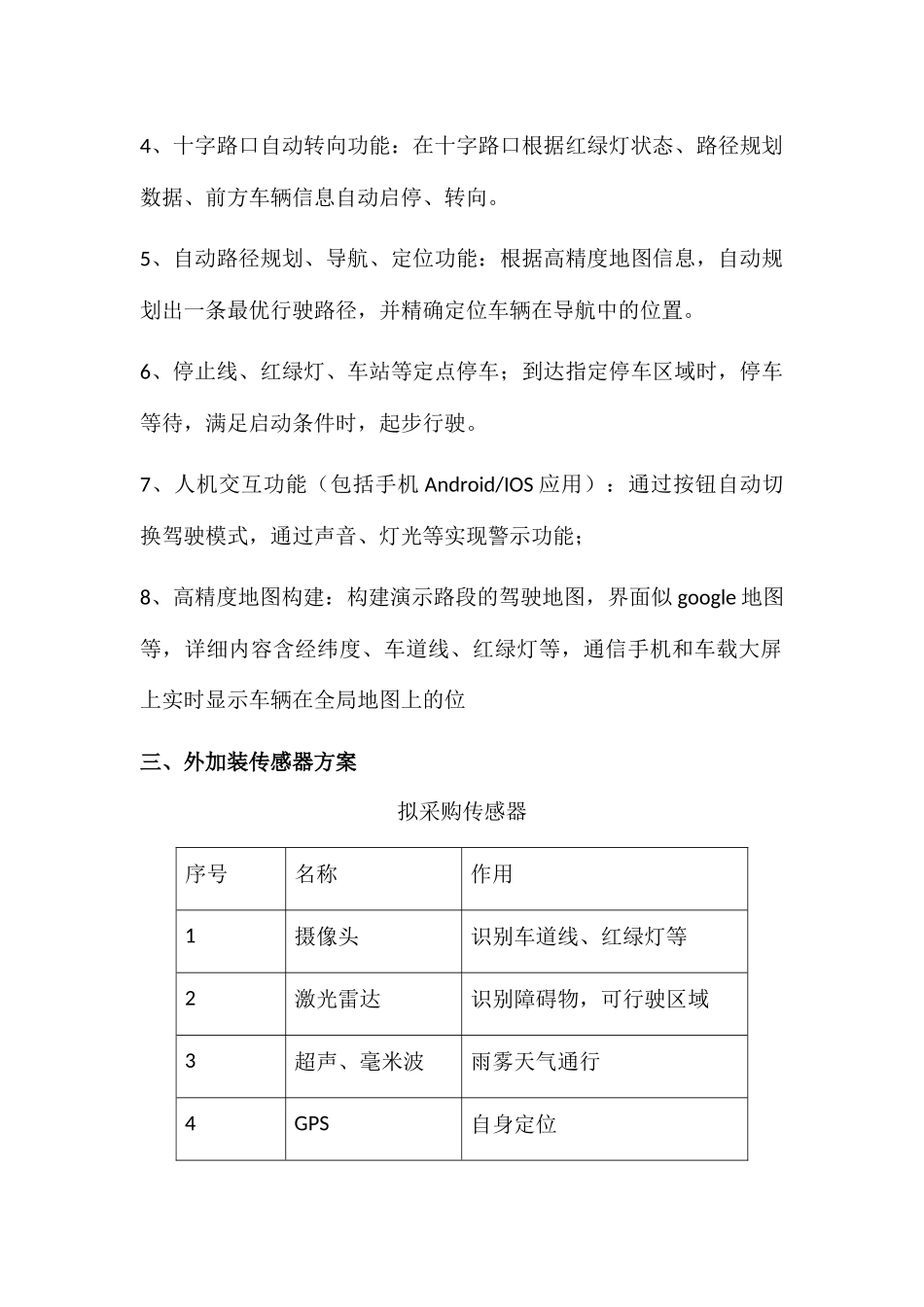
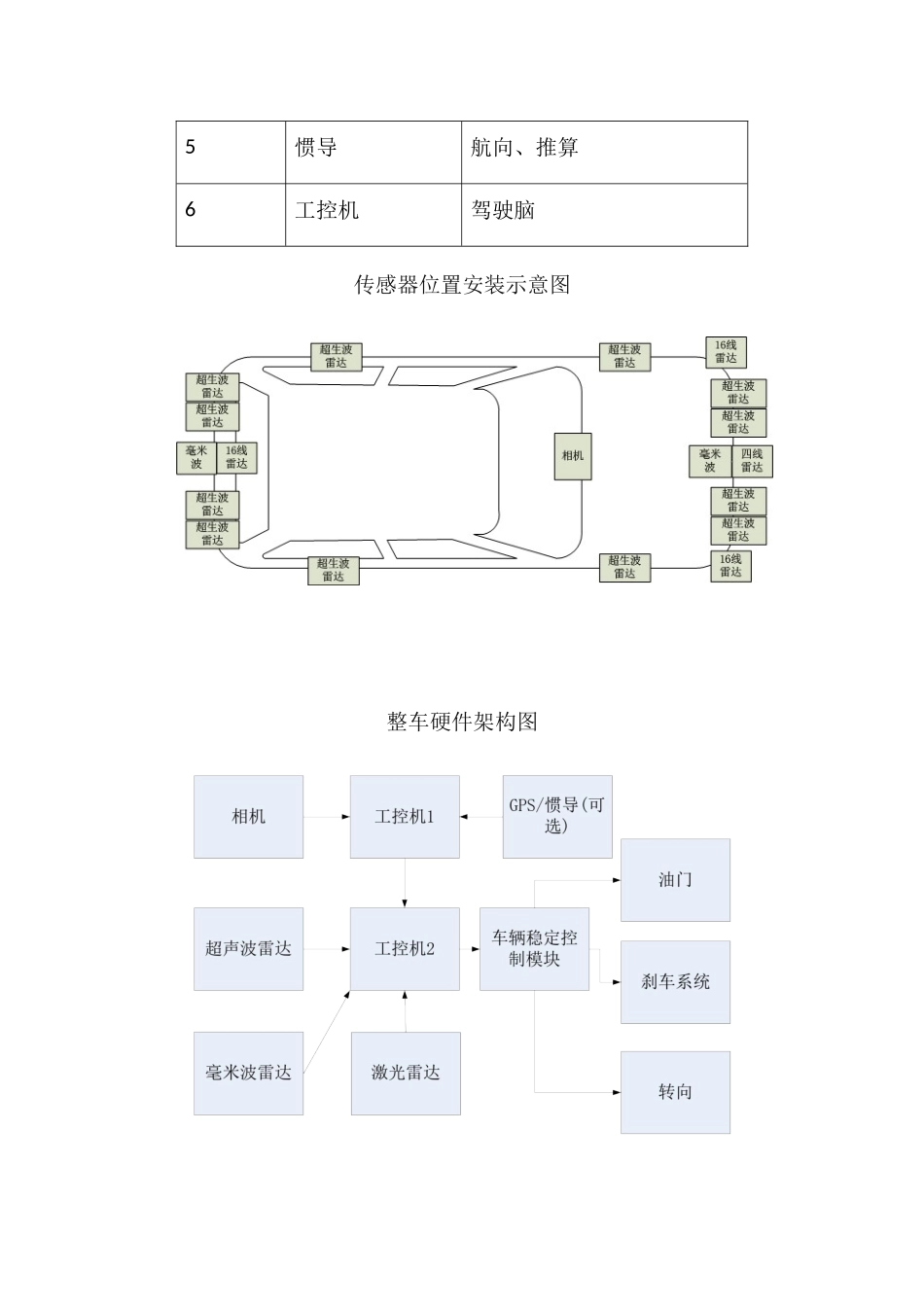
7、人机交互功能(包括手机 Android/IOS 应用):通过按钮自动切换驾驶模式,通过声音、灯光等实现警示功能;8、高精度地图构建:构建演示路段的驾驶地图,界面似 google 地图等,详细内容含经纬度、车道线、红绿灯等,通信手机和车载大屏上实时显示车辆在全局地图上的位三、外加装传感器方案拟采购传感器序号名称作用1摄像头识别车道线、红绿灯等2激光雷达识别障碍物,可行驶区域3超声、毫米波雨雾天气通行4GPS自身定位5惯导航向、推算6工控机驾驶脑传感器位置安装示意图整车硬件架构图四、演示科目示例
1、园区智能驾驶演示园区内通勤车线路,全长 4
2km,巡线环场区开放道路,含 4 个红绿灯路口