1.参数方程的概念 1.参数方程的概念在平面直角坐标系中,曲线上任一点的坐标 x,y 都是某个变数 t(θ,φ,…)的函数:①,并且对于每一个 t 的允许值,方程组①所确定的点(x,y)都在这条曲线上,那么方程组①就叫这条曲线的参数方程,t 叫做参数,相对于参数方程而言,直接给出坐标间关系的方程叫普通方程.2.参数的意义参数是联系变数 x,y 的桥梁,可以是有物理意义或几何意义的变数,也可以是没有明显实际意义的变数. 参数方程表示的曲线上的点[例 1] 已知曲线 C 的参数方程是(t 为参数).(1)判断点 M1(0,1),M2(5,4)与曲线 C 的位置关系.(2)已知点 M3(6,a)在曲线 C 上,求 a 的值.[思路点拨] 由参数方程的概念,只需判断对应于点的参数是否存在即可,若存在,说明点在曲线上,否则不在曲线上.[解] (1)把点 M1的坐标(0,1)代入方程组,得:解得:t=0
∴点 M1在曲线 C 上.同理:可知点 M2不在曲线 C 上.(2) 点 M3(6,a)在曲线 C 上,∴解得:t=2,a=9
参数方程是曲线方程的另一种表达形式,点与曲线位置关系的判断,与平面直角坐标方程下的判断方法是一致的.1.已知点 M(2,-2)在曲线 C:(t 为参数)上,则其对应的参数 t 的值为________.解析:由 t+=2 知 t=1
答案:12.已知某条曲线 C 的参数方程为(其中 t 为参数,a∈R).点 M(5,4)在该曲线上,求常数 a
解: 点 M(5,4)在曲线 C 上,∴解得:∴a 的值为 1
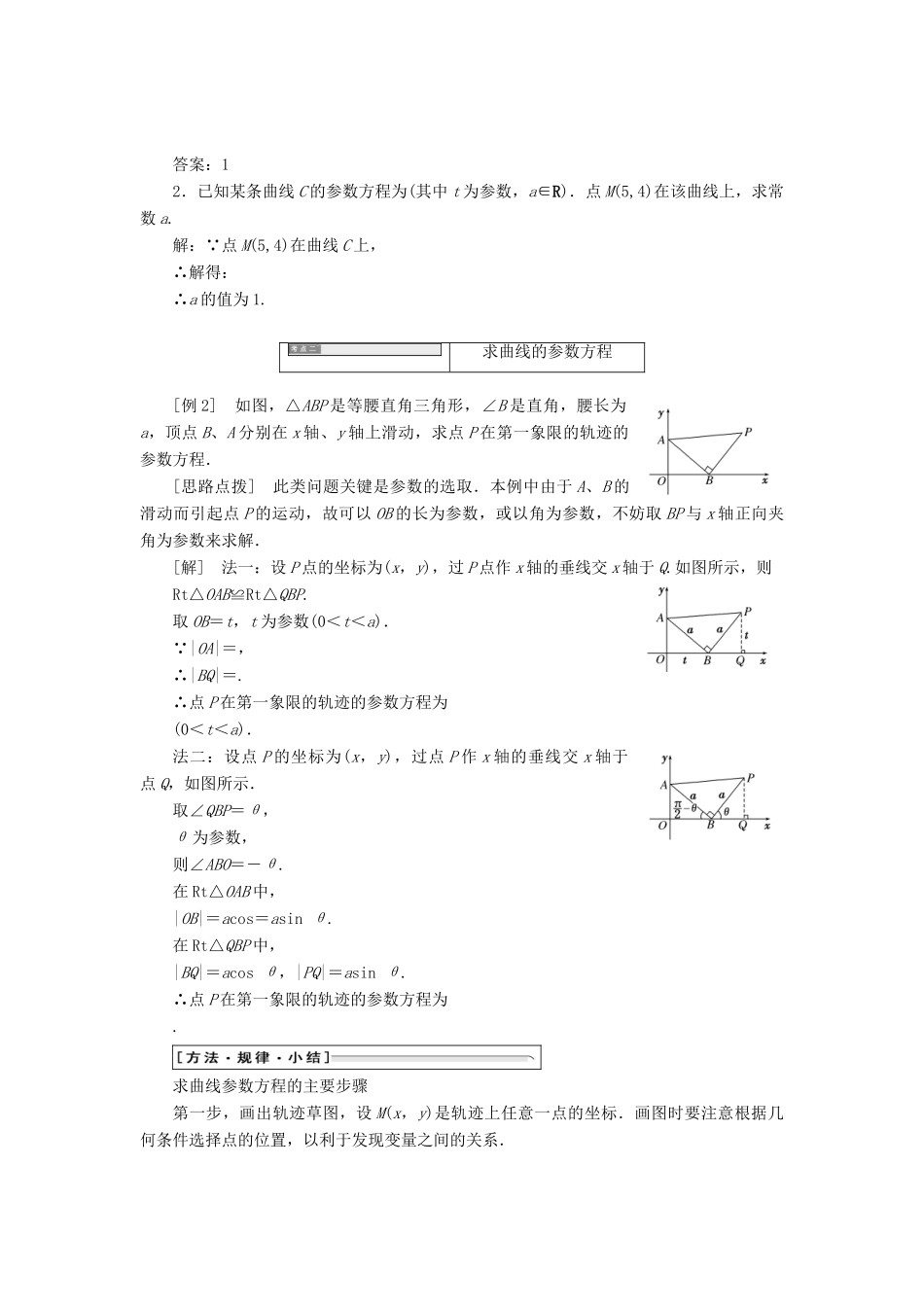
求曲线的参数方程[例 2] 如图,△ABP 是等腰直角三角形,∠B 是直角,腰长为a,顶点 B、A 分别在 x 轴、y 轴上滑动,求点 P 在第一象限的轨迹的参数方程.[思路点拨] 此类问题关键是参数的选取.本例中由于 A、B 的滑动而引起点 P 的