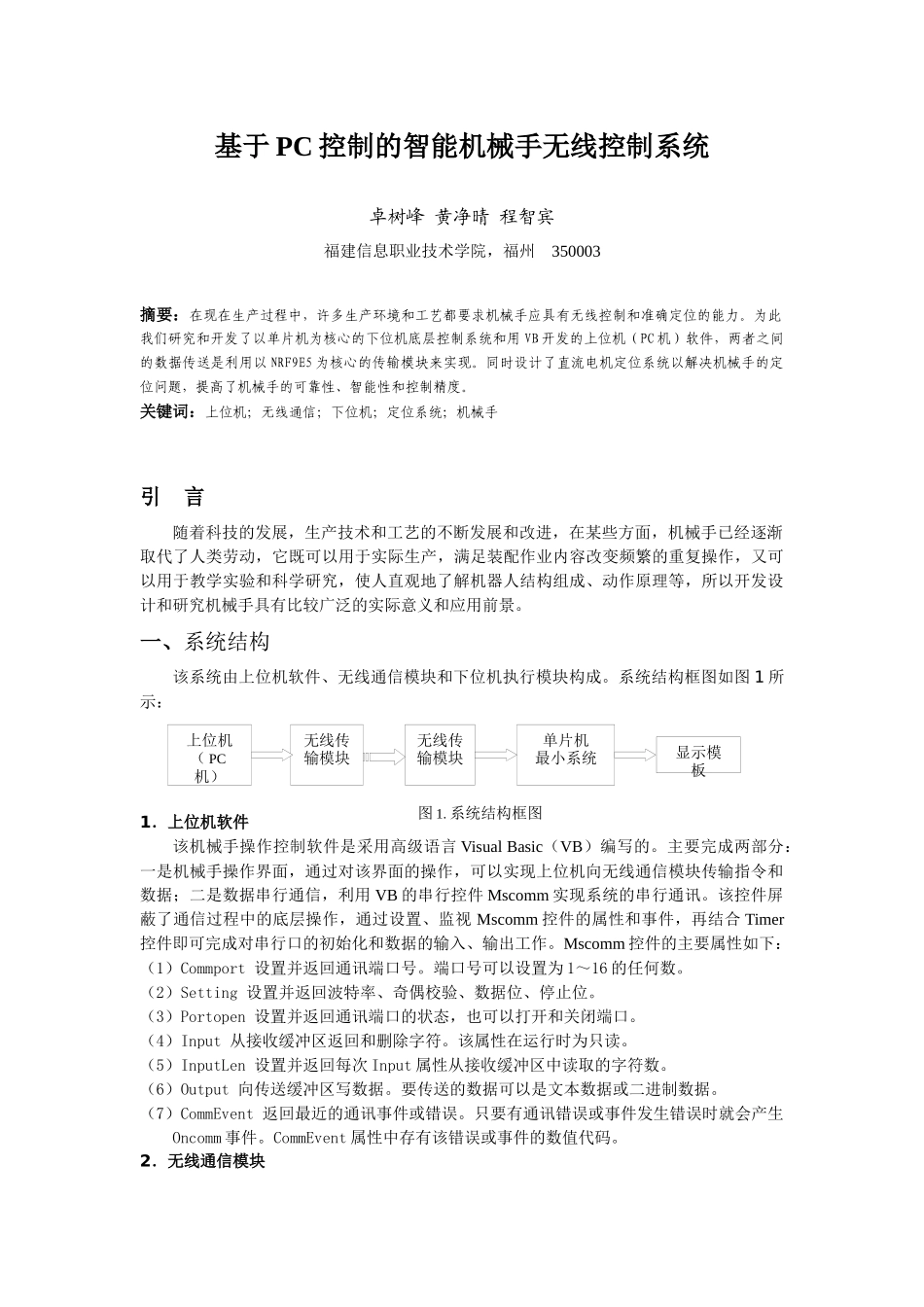
上位机(PC机)无线传输模块无线传输模块单片机最小系统显示模板图1
系统结构框图基于PC控制的智能机械手无线控制系统卓树峰黄净晴程智宾福建信息职业技术学院,福州350003摘要:在现在生产过程中,许多生产环境和工艺都要求机械手应具有无线控制和准确定位的能力
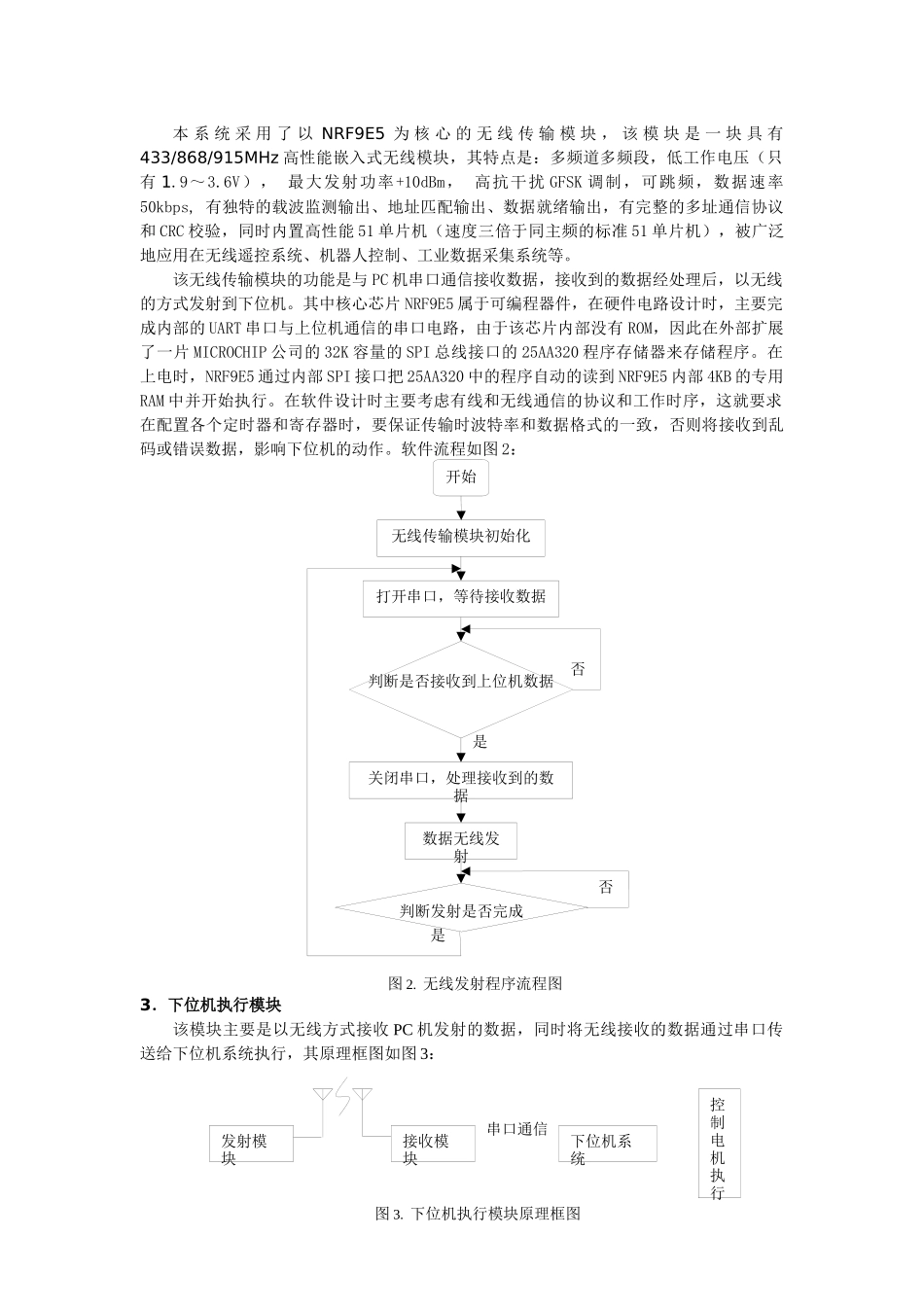
为此我们研究和开发了以单片机为核心的下位机底层控制系统和用VB开发的上位机(PC机)软件,两者之间的数据传送是利用以NRF9E5为核心的传输模块来实现
同时设计了直流电机定位系统以解决机械手的定位问题,提高了机械手的可靠性、智能性和控制精度
关键词:上位机;无线通信;下位机;定位系统;机械手引言随着科技的发展,生产技术和工艺的不断发展和改进,在某些方面,机械手已经逐渐取代了人类劳动,它既可以用于实际生产,满足装配作业内容改变频繁的重复操作,又可以用于教学实验和科学研究,使人直观地了解机器人结构组成、动作原理等,所以开发设计和研究机械手具有比较广泛的实际意义和应用前景
一、系统结构该系统由上位机软件、无线通信模块和下位机执行模块构成
系统结构框图如图1所示:1.上位机软件该机械手操作控制软件是采用高级语言VisualBasic(VB)编写的
主要完成两部分:一是机械手操作界面,通过对该界面的操作,可以实现上位机向无线通信模块传输指令和数据;二是数据串行通信,利用VB的串行控件Mscomm实现系统的串行通讯
该控件屏蔽了通信过程中的底层操作,通过设置、监视Mscomm控件的属性和事件,再结合Timer控件即可完成对串行口的初始化和数据的输入、输出工作
Mscomm控件的主要属性如下:(1)Commport设置并返回通讯端口号
端口号可以设置为1~16的任何数
(2)Setting设置并返回波特率、奇偶校验、数据位、停止位
(3)Portopen设置并返回通讯端口的状态,也可以打开和关闭端口
(4)Input从接收缓冲区返回和