目录1、前言----------------------------------------------------------------------------22、确定对液压系统的工作要求----------------------------------------------23、拟定液压系统原理图--------------------------------------------------------33
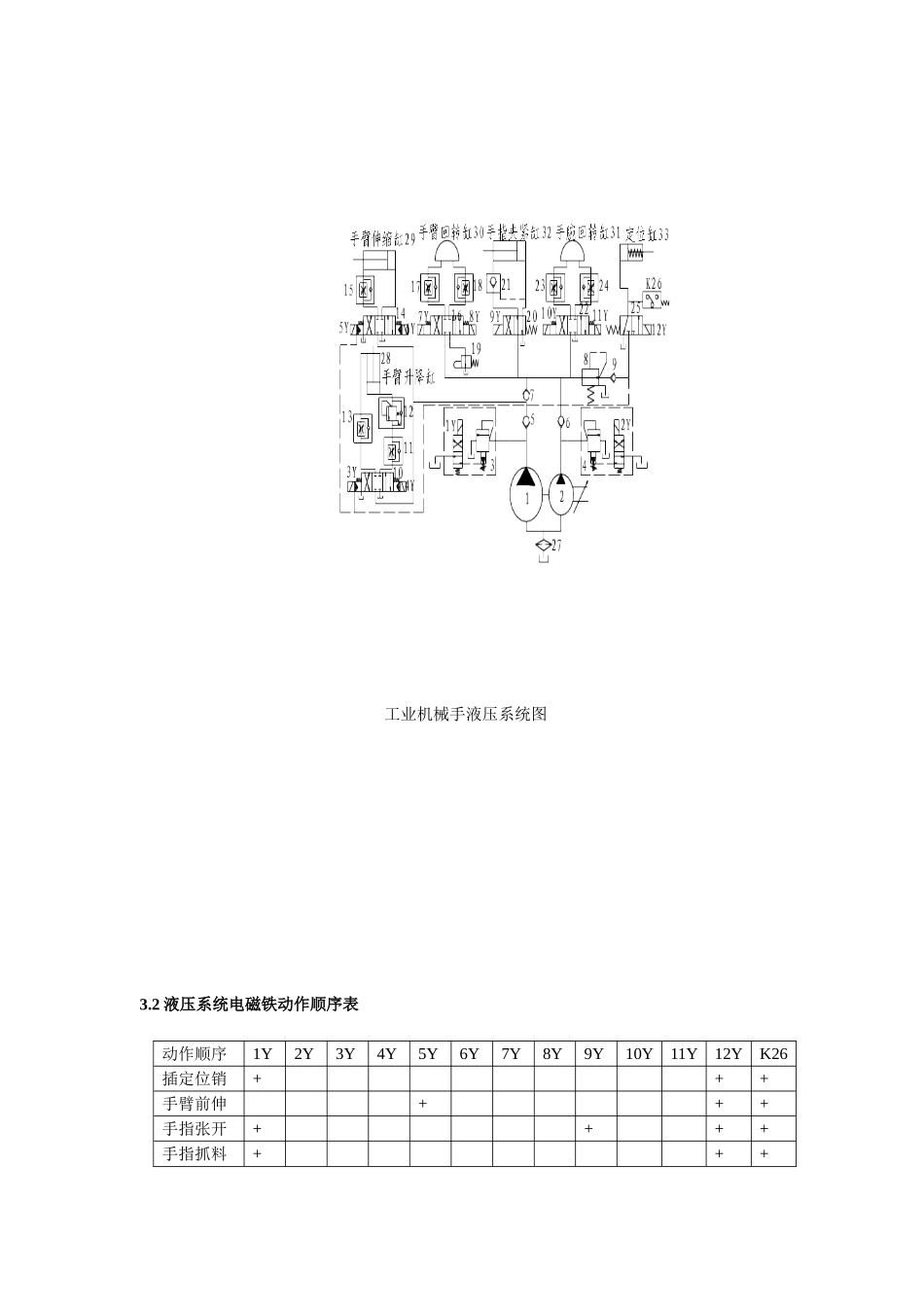
1液压系统原理图-----------------------------------------------------------------------------------33
2液压系统电磁铁动作顺序表--------------------------------------------------------------------43
3液压系统工作原理--------------------------------------------------------------------------------43
4液压系统特点分析--------------------------------------------------------------------------------73
5电气系统原理图-----------------------------------------------------------------------------------83
6电气系统工作原理--------------------------------------------------------------------------------83
7电气系统特点分析-----------------------------