某实验小组利用力传感器和光电门传感器探究“动能定理”
将力传感器固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,力传感器记录小车受到拉力的大小
在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示
在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小,摩擦力不计
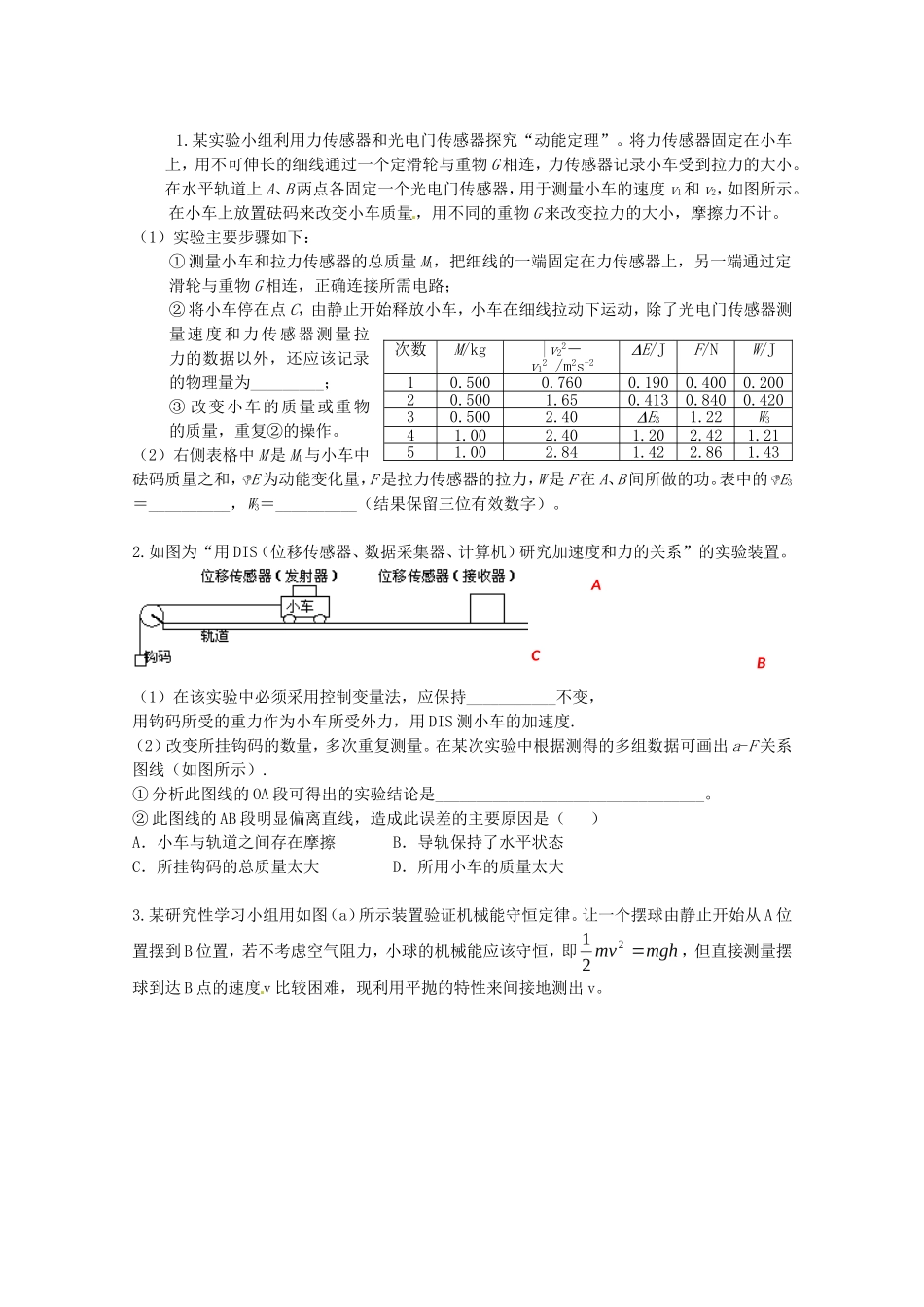
(1)实验主要步骤如下:①测量小车和拉力传感器的总质量M1,把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连,正确连接所需电路;②将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为_________;③改变小车的质量或重物的质量,重复②的操作
(2)右侧表格中M是M1与小车中砝码质量之和,E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功
表中的E3=__________,W3=__________(结果保留三位有效数字)
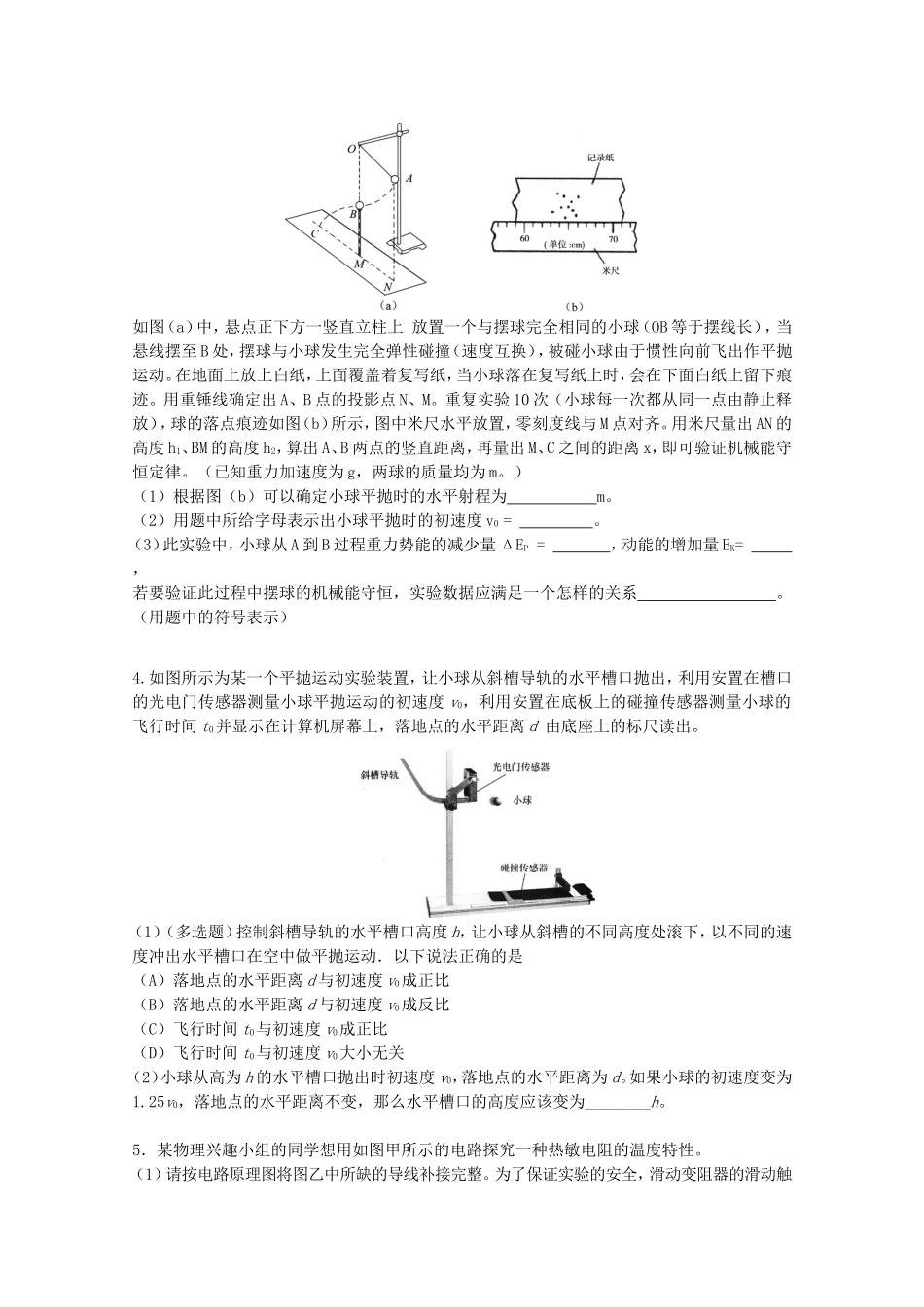
如图为“用DIS(位移传感器、数据采集器、计算机)研究加速度和力的关系”的实验装置
(1)在该实验中必须采用控制变量法,应保持___________不变,用钩码所受的重力作为小车所受外力,用DIS测小车的加速度
(2)改变所挂钩码的数量,多次重复测量
在某次实验中根据测得的多组数据可画出a-F关系图线(如图所示)
①分析此图线的OA段可得出的实验结论是_________________________________
②此图线的AB段明显偏离直线,造成此误差的主要原因是()A.小车与轨道之间存在摩擦B.导轨保持了水平状态C.所挂钩码的总质量太大D.所用小车的质量太大3
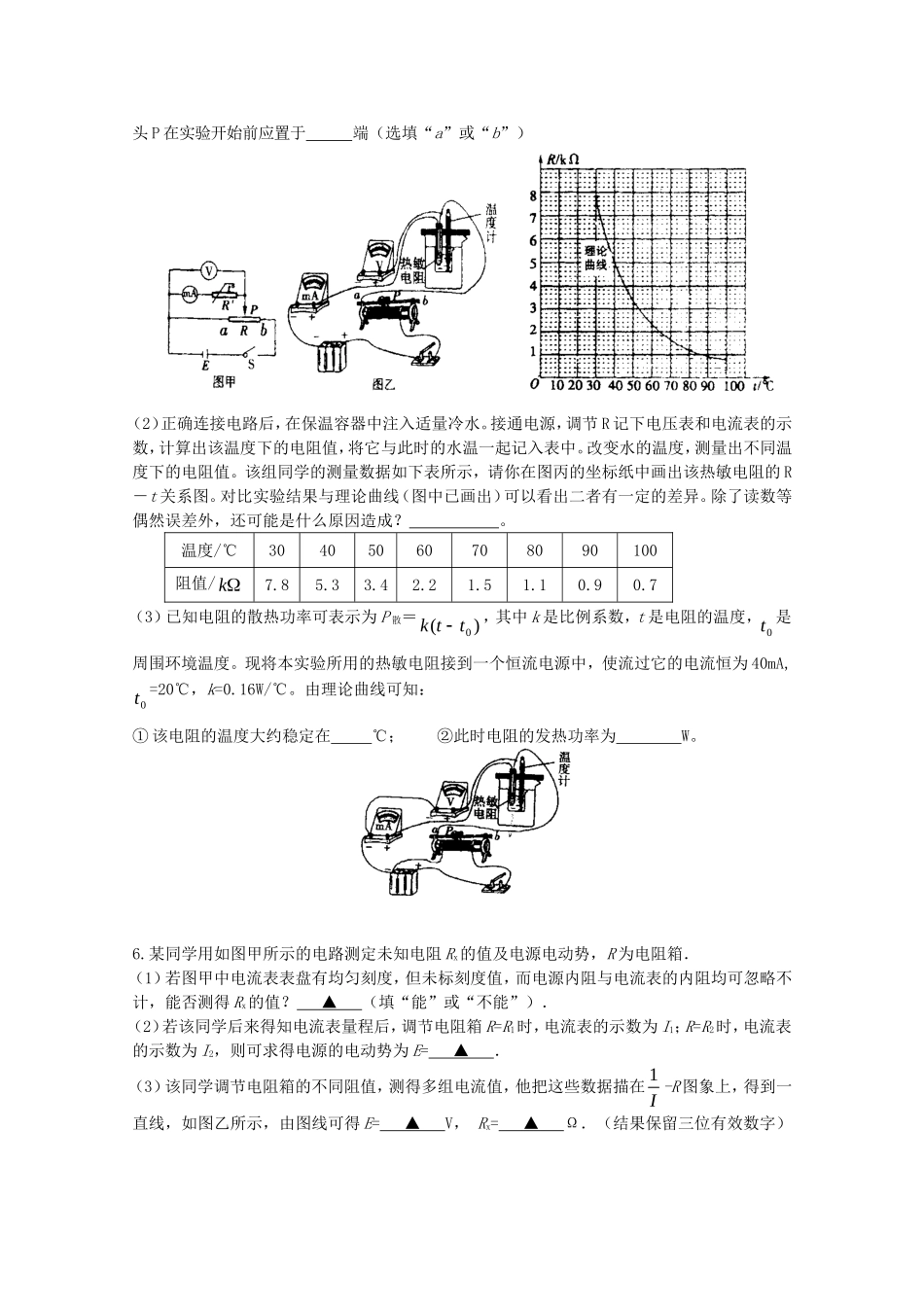
某研究性学习小组用如图(a)所示装置验证机械能守恒定律
让一个摆球由静止开始从A位置摆到B位置,若不考虑空气阻力,小球的机械能应该守恒,即mghmv221,但直接