环境感知行动真空吸尘器问题一实验目的在人工智能领域,有一个重要部分,是研究智能化智能体的
智能体可以被视为通过传感器感知所处环境并通过执行器对该环境产生作用的东西
本实验分析真空吸尘器这个简单反射型智能体、环境以及它们之间的关系
验证该吸尘器是否是理性智能体(行为表现尽可能好的智能体)
二实验内容1
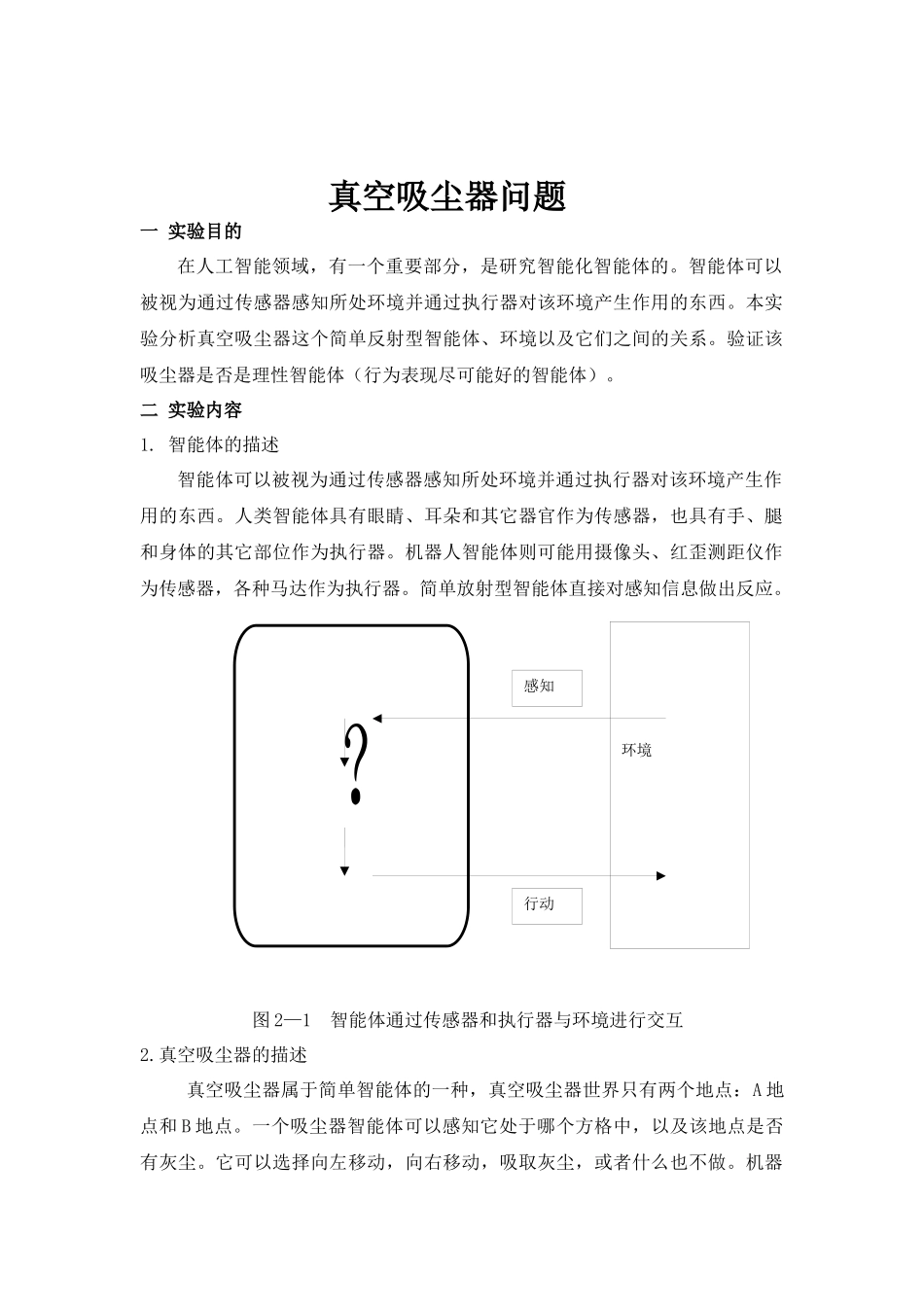
智能体的描述智能体可以被视为通过传感器感知所处环境并通过执行器对该环境产生作用的东西
人类智能体具有眼睛、耳朵和其它器官作为传感器,也具有手、腿和身体的其它部位作为执行器
机器人智能体则可能用摄像头、红歪测距仪作为传感器,各种马达作为执行器
简单放射型智能体直接对感知信息做出反应
图2—1智能体通过传感器和执行器与环境进行交互2
真空吸尘器的描述真空吸尘器属于简单智能体的一种,真空吸尘器世界只有两个地点:A地点和B地点
一个吸尘器智能体可以感知它处于哪个方格中,以及该地点是否有灰尘
它可以选择向左移动,向右移动,吸取灰尘,或者什么也不做
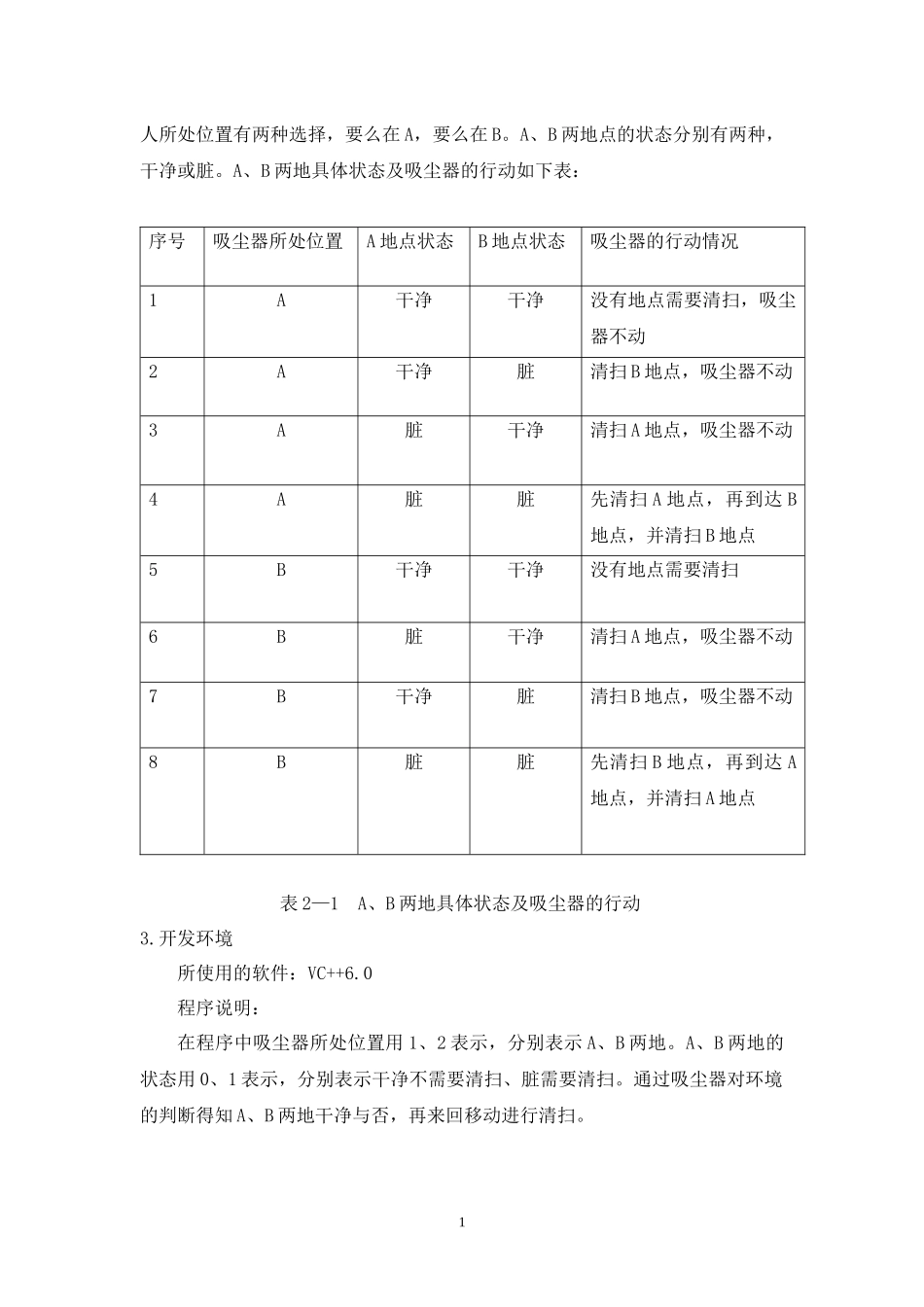
机器人所处位置有两种选择,要么在A,要么在B
A、B两地点的状态分别有两种,干净或脏
A、B两地具体状态及吸尘器的行动如下表:序号吸尘器所处位置A地点状态B地点状态吸尘器的行动情况1A干净干净没有地点需要清扫,吸尘器不动2A干净脏清扫B地点,吸尘器不动3A脏干净清扫A地点,吸尘器不动4A脏脏先清扫A地点,再到达B地点,并清扫B地点5B干净干净没有地点需要清扫6B脏干净清扫A地点,吸尘器不动7B干净脏清扫B地点,吸尘器不动8B脏脏先清扫B地点,再到达A地点,并清扫A地点表2—1A、B两地具体状态及吸尘器的行动3
开发环境所使用的软件:VC++6
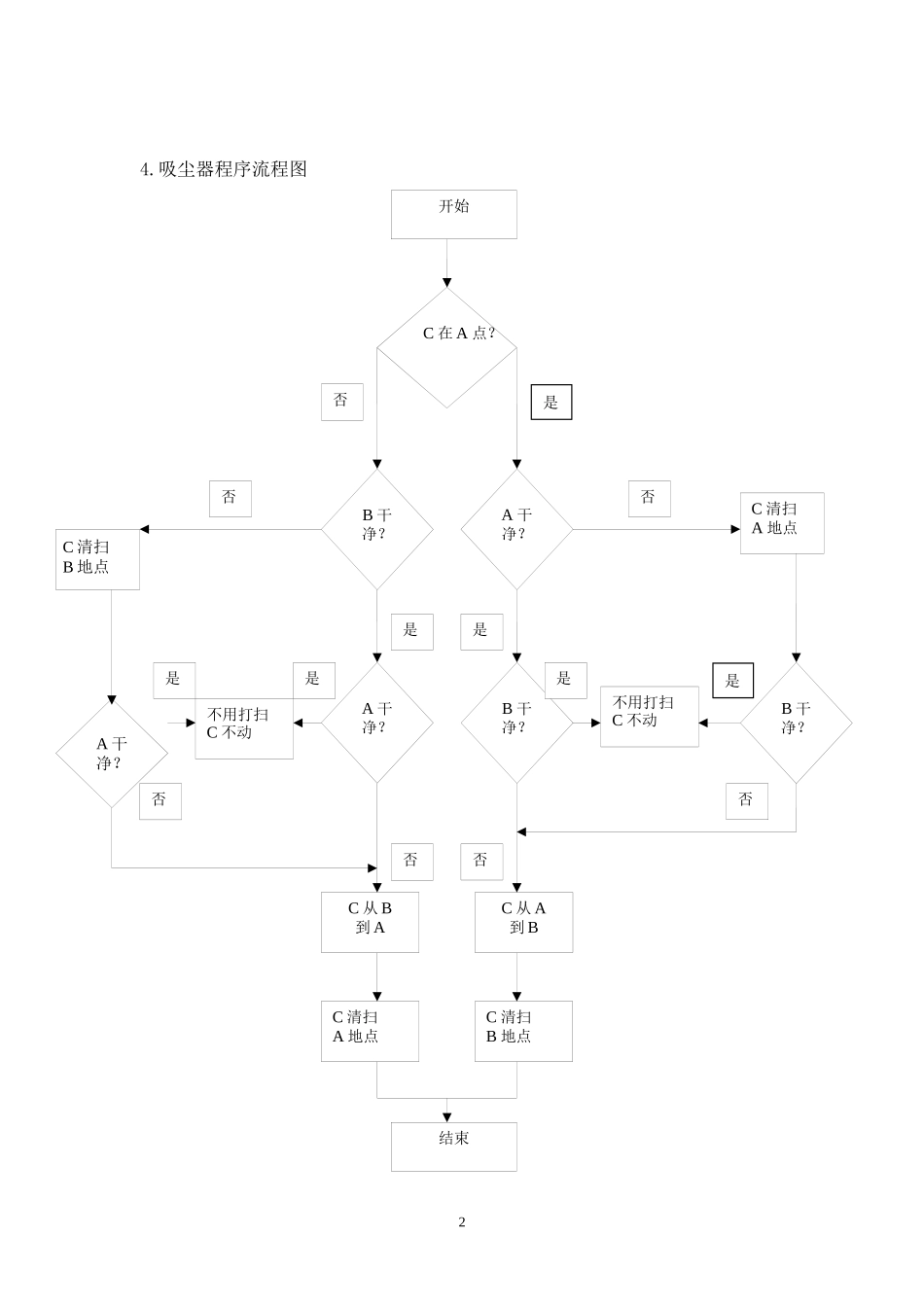
0程序说明:在程序中吸尘器所处位置用1、2表示,分别表示A、B两地
A、B两地的状态用0、1表示,分别表示干净不需要清扫、脏需要清扫
通过吸尘器对环境的判断得知A、B两地干净与否,再来回移动进行清扫