工业机器人手臂的静态平衡第一部分:平衡离散IonSimionescu*,LiviuCiupituMechanicalEngineeringDepartment,POLITEHNICAUniversityofBucharest,SplaiulIndependentei313,RO-77206,Bucharest6,RomaniaReceived2October1998;accepted19May1999摘要:本文介绍了一些在工业机器人手臂的重量平衡解决方案,运用了螺旋弹簧的弹性力量
垂直和水平手臂的重量力量的平衡显示很多备选方案
最后,举例子,解决一个数值示例
关键词:工业机器人;静态平衡;离散平衡72000ElsevierScienceLtd
Allrightsreserved
介绍机器人及工业机器人机制构成了一个特殊类别的机器系统,其特点是大质量的元素在一个垂直平面移动速度相对缓慢
基于这个原因,重量势力成了驱动系统必须要克服的一大份额的阻力
对于平衡重量力量的问题,可编程序的机器人是非常重要的,在训练期间,人工操作必须容易地驾驶机械系统
一般来说,工业机器人手臂的重量平衡力量都将会削弱驱动力量
在轴承发生的摩擦力没有被考虑到,因为摩擦时刻感觉取决于相对运动感觉
在这项工作中,对直圆柱螺旋弹簧弹力影响力量平衡问题的可能性进行了分析
这种平衡的可以被分离出来,可以是工作领域位置的有限数字,或者在在工作领域中的所有位置的连续
因此,离散系统只能实现了机器人手臂的近似平衡
增量的使用并没有被考虑在内,因为他们涉及到了移动的质量物体的增加,整体大小,惯性和组分的压力
在一固定水平轴附近的重量力量的平衡通过螺旋弹簧的弹力来平衡机器手和机器人的重量力量,有集中可行的方案
简单的解决方案并不总是适用的
有时候从建筑角度来首选一个有效的近似解替代原先方案
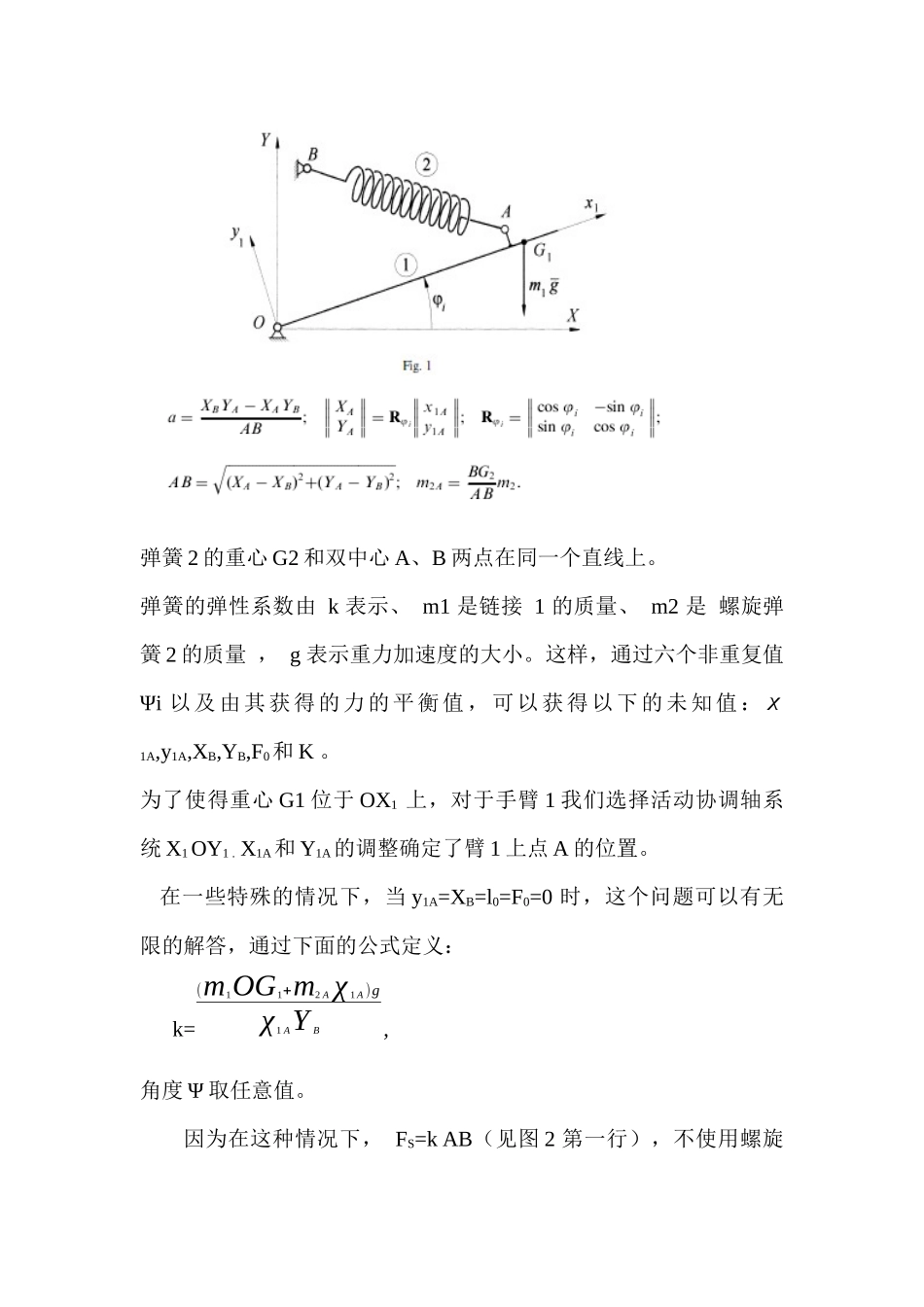
在一个水平固定轴附近的链