'
应用一图论算法图论在计算机处理问题中占有重要地位,现实中的很多问题最终都可以转化成图论问题,或者要借助图结构来存储和处理
但是怎么把一张图存入计算机就要涉及到数学建模的知识
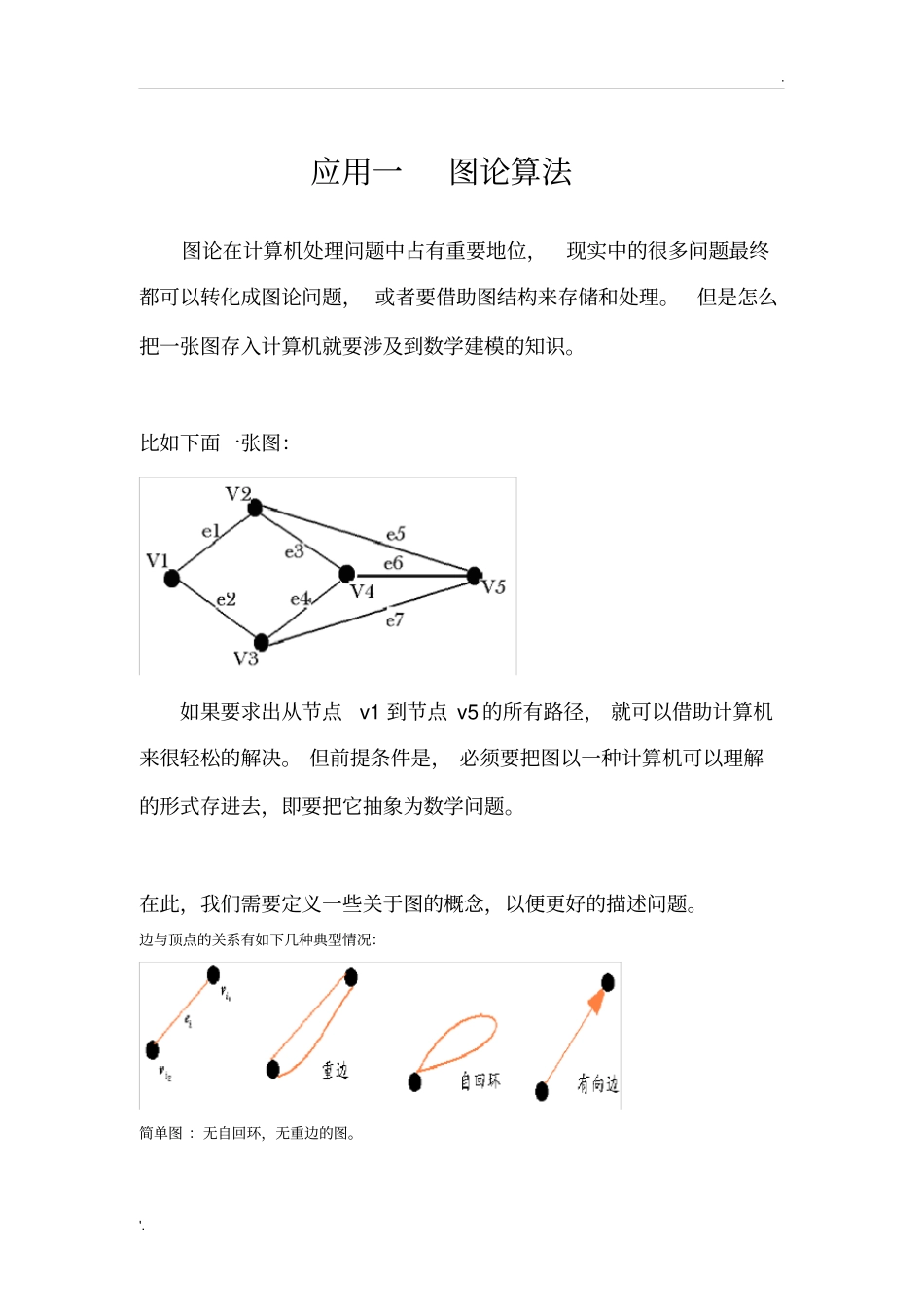
比如下面一张图:如果要求出从节点v1到节点v5的所有路径,就可以借助计算机来很轻松的解决
但前提条件是,必须要把图以一种计算机可以理解的形式存进去,即要把它抽象为数学问题
在此,我们需要定义一些关于图的概念,以便更好的描述问题
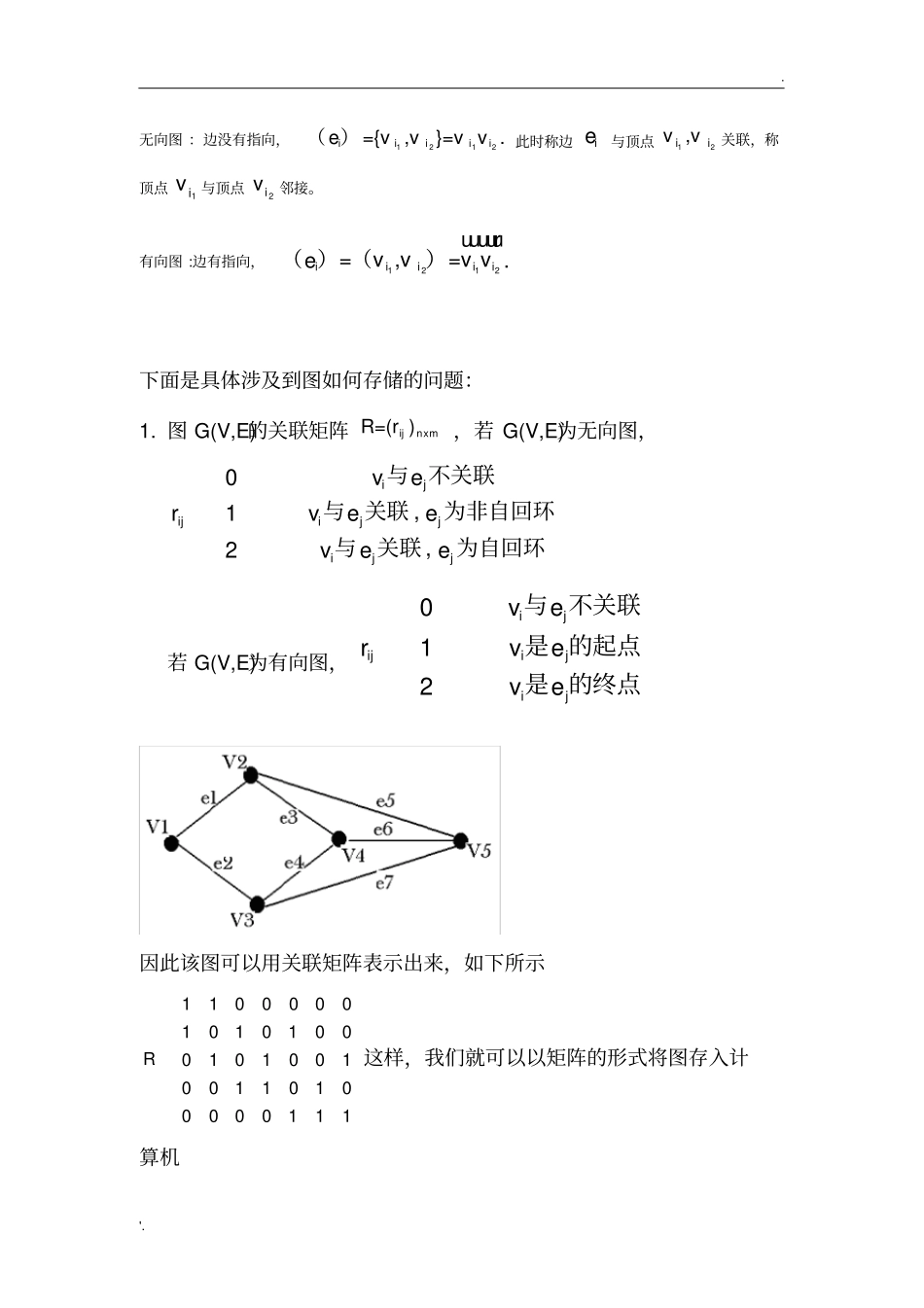
边与顶点的关系有如下几种典型情况:简单图:无自回环,无重边的图
'
无向图:边没有指向,1212e
iiiii()={v,v}=vv此时称边ei与顶点12iiv,v关联,称顶点1iv与顶点2iv邻接
有向图:边有指向,1212e
iiiiiuuuuur()=(v,v)=vv下面是具体涉及到图如何存储的问题:1
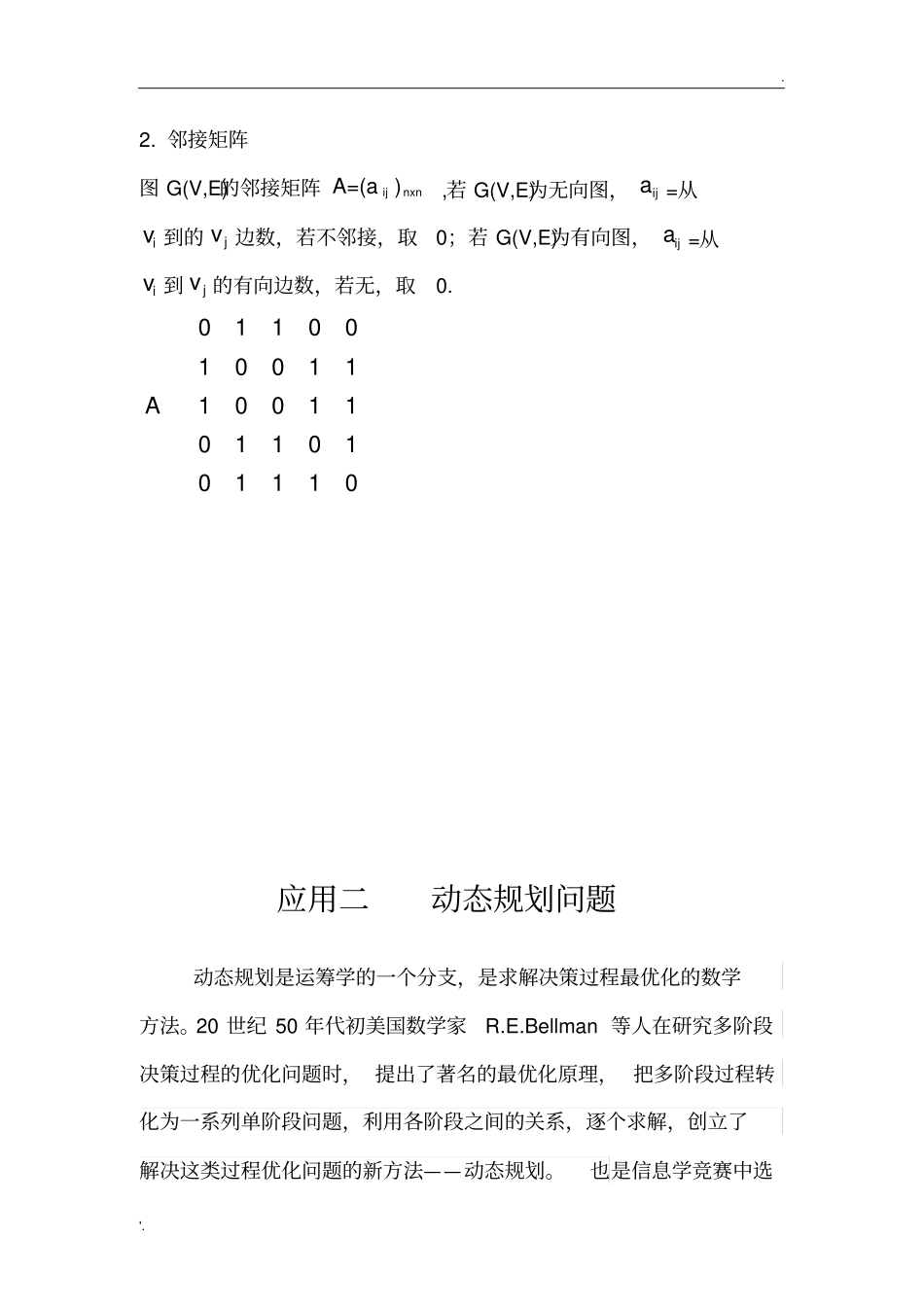
图G(V,E)的关联矩阵xR=(r)ijnm,若G(V,E)为无向图,012ijijijjijjverveevee与不关联与关联,为非自回环与关联,为自回环若G(V,E)为有向图,012ijijijijverveve与不关联是的起点是的终点因此该图可以用关联矩阵表示出来,如下所示11000001010100010100100110100000111R这样,我们就可以以矩阵的形式将图存入计算机
'
邻接矩阵图G(V,E)的邻接矩阵xnA=(a)ijn,若G(V,E)为无向图,ija=从iv到的jv边数,若不邻接,取0;若G(V,E)为有向图,ija=从iv到jv的有向边数,若无,取0
0110010011100110110101110A应用二动态规划问题动态规划是运筹学的一个分支,是求解决策过程最优化的数学方法
20世纪50年代初美国数学家R
Bellman等人在研究多阶段决策过程的优化问题时,提出了著名的最优化原理,把多阶段过程