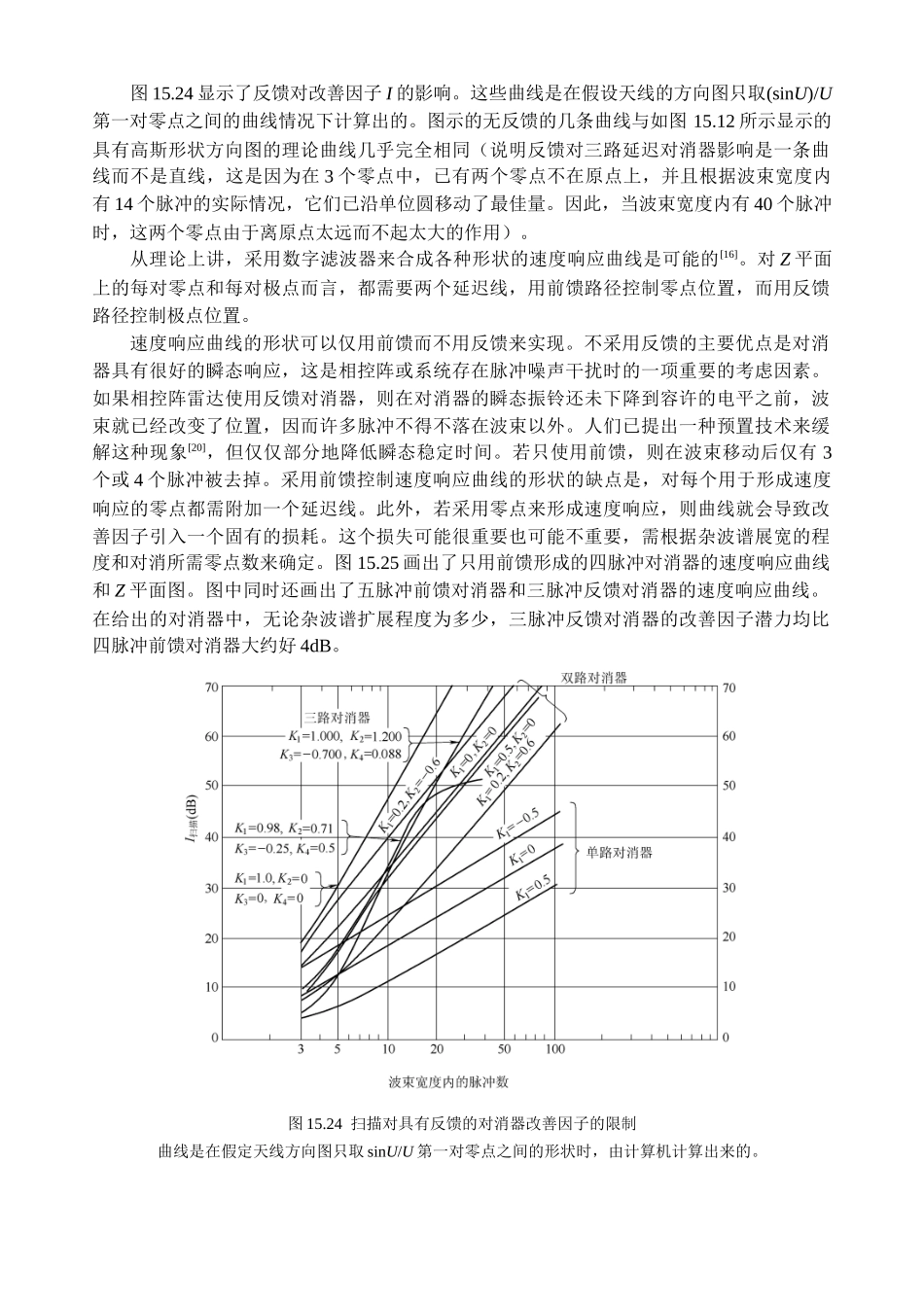
24显示了反馈对改善因子I的影响
这些曲线是在假设天线的方向图只取(sinU)/U第一对零点之间的曲线情况下计算出的
图示的无反馈的几条曲线与如图15
12所示显示的具有高斯形状方向图的理论曲线几乎完全相同(说明反馈对三路延迟对消器影响是一条曲线而不是直线,这是因为在3个零点中,已有两个零点不在原点上,并且根据波束宽度内有14个脉冲的实际情况,它们已沿单位圆移动了最佳量
因此,当波束宽度内有40个脉冲时,这两个零点由于离原点太远而不起太大的作用)
从理论上讲,采用数字滤波器来合成各种形状的速度响应曲线是可能的[16]
对Z平面上的每对零点和每对极点而言,都需要两个延迟线,用前馈路径控制零点位置,而用反馈路径控制极点位置
速度响应曲线的形状可以仅用前馈而不用反馈来实现
不采用反馈的主要优点是对消器具有很好的瞬态响应,这是相控阵或系统存在脉冲噪声干扰时的一项重要的考虑因素
如果相控阵雷达使用反馈对消器,则在对消器的瞬态振铃还未下降到容许的电平之前,波束就已经改变了位置,因而许多脉冲不得不落在波束以外
人们已提出一种预置技术来缓解这种现象[20],但仅仅部分地降低瞬态稳定时间
若只使用前馈,则在波束移动后仅有3个或4个脉冲被去掉
采用前馈控制速度响应曲线的形状的缺点是,对每个用于形成速度响应的零点都需附加一个延迟线
此外,若采用零点来形成速度响应,则曲线就会导致改善因子引入一个固有的损耗
这个损失可能很重要也可能不重要,需根据杂波谱展宽的程度和对消所需零点数来确定
25画出了只用前馈形成的四脉冲对消器的速度响应曲线和Z平面图
图中同时还画出了五脉冲前馈对消器和三脉冲反馈对消器的速度响应曲线
在给出的对消器中,无论杂波谱扩展程度为多少,三脉冲反馈对消器的改善因子潜力均比四脉冲前馈对消器大约好4dB
24扫描对具有反馈的对消器改善因子的限制曲线是在假定天线方向