电动汽车稳定性控制中的车体侧偏角观测器研究耿聪1,堀洋一2,青木良文2(1
东京大学电气系,东京都东京市153-8505;2
东京大学生产技术研究所,东京都东京市153-8505)摘要:采用轮毂电机独立驱动的电动汽车可采用直接横摆力矩控制(DirectYaw-momentControl,DYC)等稳定性控制,而车体侧偏角(简称β角)是稳定性控制中的重要参数
直接测定车体侧偏角的传感器相当昂贵,所以我们需要从能够容易测得的参数来进行车体侧偏角的推测
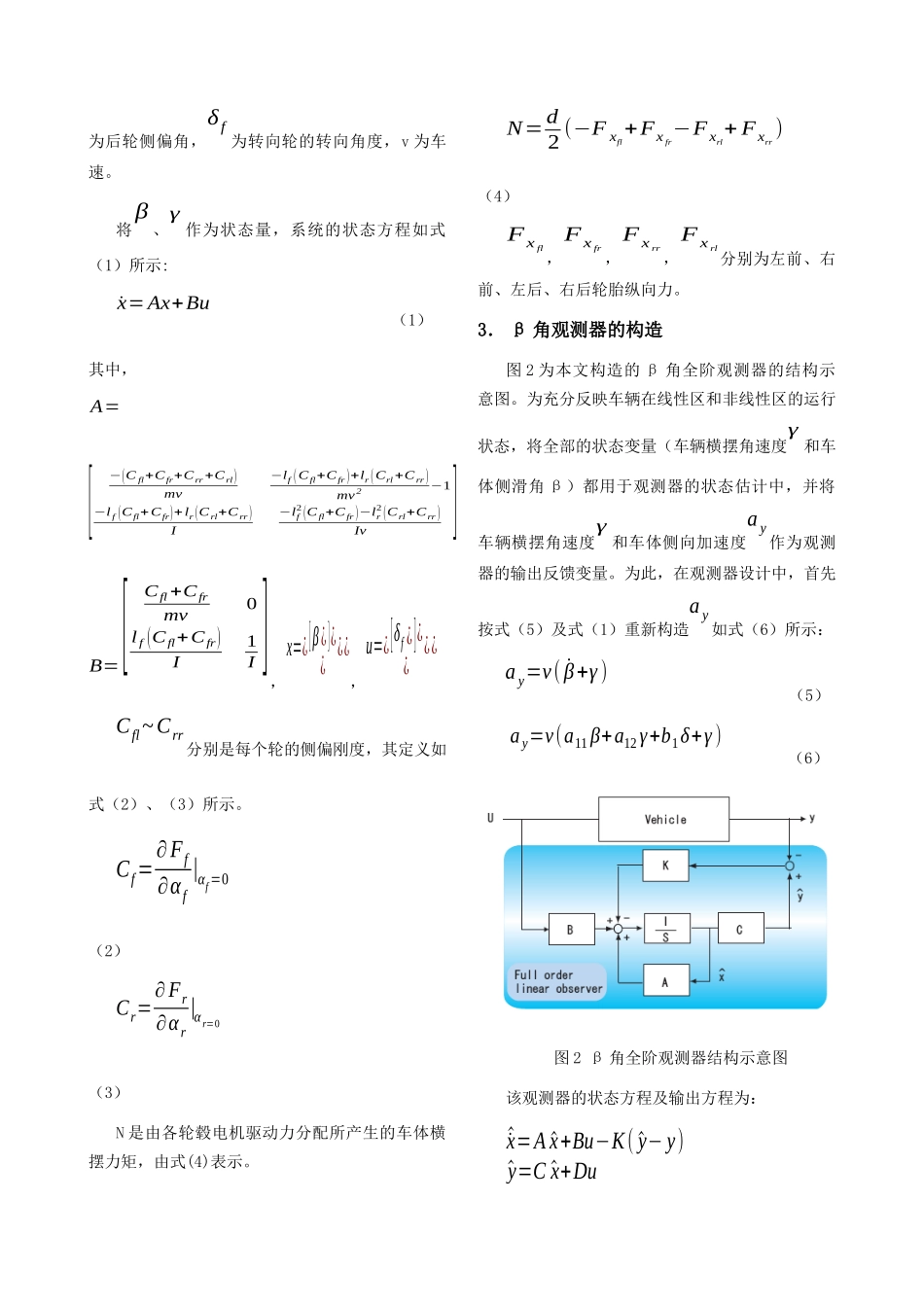
Hori研究室设计了一种用于β角推测的观测器,并充分考虑了车辆运行工况变化所引起的系统模型参数变化,进行了观测器鲁棒性设计以及轮胎侧偏刚度在线辨识,使观测器具备了足够的鲁棒性来克服大的模型误差影响,试验结果证明了该观测器的有效性
关键词:电动汽车;车辆稳定性控制;车体侧偏角;观测器DesignofBodySlipAngleObserverforElectricVehicleStabilizationControlwithDriven-Motor-in-WheelsGengCong1,HoriYoichi2,YoshifumiAoki2(1
DepartmentofElectricalEngineering,theUniversityofTokyo,Tokyo153-8505,Japan;2
InstituteofIndustrialScience,theUniversityofTokyo,Tokyo153-8505,Japan
)Correspondingauthor:GENGCong,E-mail:geng@horilab
u-tokyo
jpAbstract:Bodyslipangle(βangle)isimportantforelectricvehicle(EV)motioncontrolwithdriven-