第1页共12页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共12页第八章蜗杆传动具体内容蜗杆传动特点和类型;蜗杆传动的基本参数和几何尺寸计算;蜗杆传动的效率、热平衡计算及润滑;蜗杆传动受力分析和计算载荷;蜗杆传动失效形式和设计准则;蜗杆传动材料和许用应力;蜗杆强度计算;蜗杆刚度计算;蜗杆传动的结构设计
重点蜗杆传动的基本参数和几何尺寸计算;蜗杆传动受力分析;蜗杆强度计算;蜗杆刚度计算
难点蜗杆传动受力分析
第一节蜗杆传动的特点和类型蜗杆传动由蜗杆和蜗轮组成(图8
1),用于传递交错轴之间的运动和动力,通常两轴间的交错角Σ=90°
通常蜗杆1为主动件,蜗轮2为从动件
一、蜗杆传动的特点1、优点传动比大;工作平稳,噪声低,结构紧凑;在一定条件下可实现自锁
2、缺点发热大,磨损严重,传动效率低(一般为0
9);蜗轮齿圈常采用铜合金制造,成本高
1蜗杆传动1-蜗杆,2-蜗轮(a)圆柱蜗杆传动(b)环面蜗杆传动(c)锥面蜗杆传动图8
2蜗杆传动的类型第2页共12页第1页共12页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共12页二、蜗杆传动的类型根据蜗杆形状的不同,蜗杆传动可分为圆杆蜗杆传动、环面蜗杆传动和锥面蜗杆传动三种类型,如图8
根据加工方法不同,圆柱蜗杆传动又分为阿基米德蜗杆传动(ZA型)、法向直廓蜗杆传动(ZN型)、渐开线蜗杆传动(ZI型)和圆弧圆柱蜗杆传动(ZC型)等
前三种称为普通圆柱蜗杆传动,见图8
(a)阿基米德蜗杆(b)法向直廓蜗杆第3页共12页第2页共12页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共12页(c)渐开线蜗杆图8
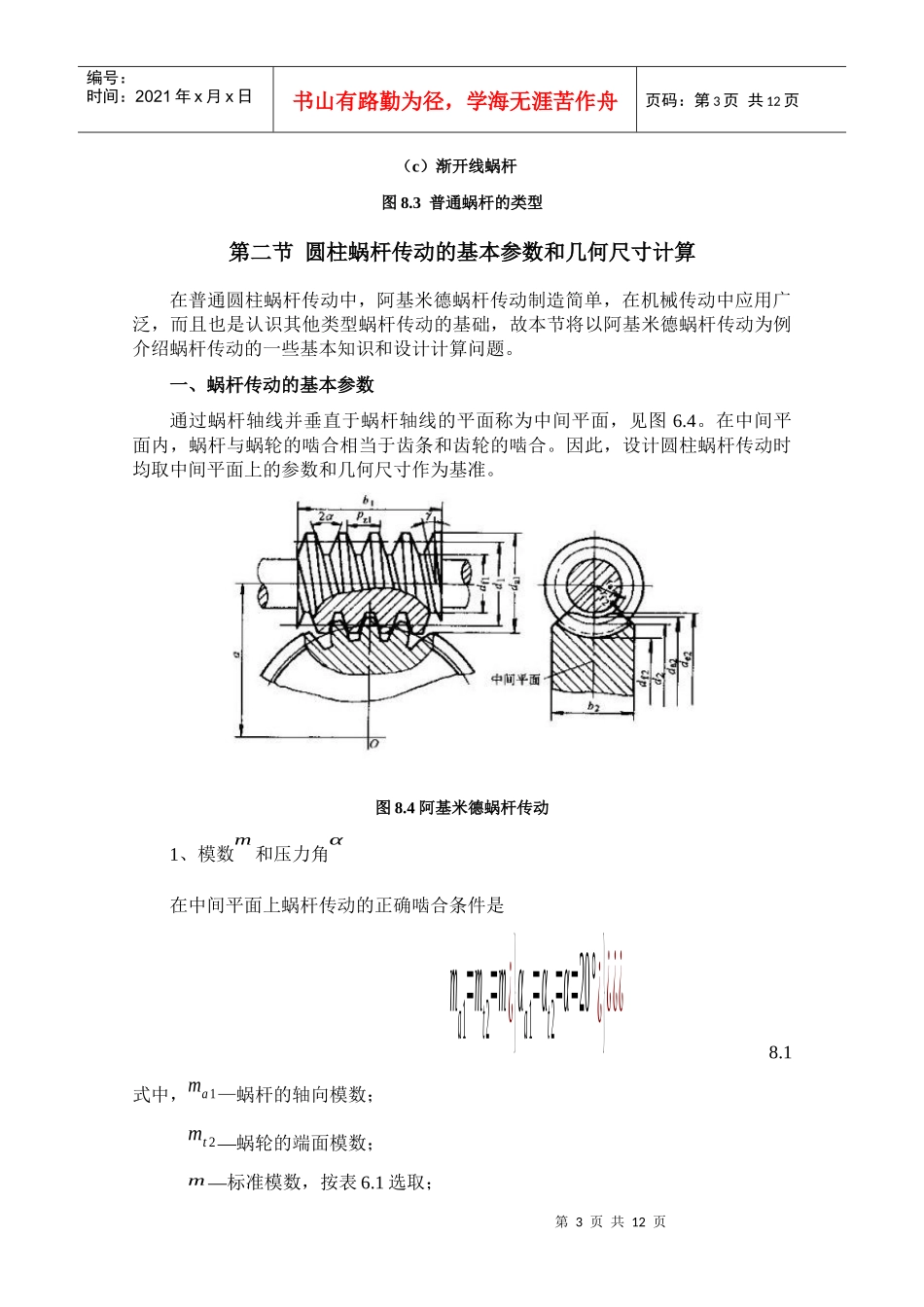
3普通蜗杆的类型第二节圆柱蜗杆传动的基本参数和几何尺寸计算在普通圆柱蜗杆传动中,阿基米德蜗杆传动制造简单,在机械传动中应用