第0页共35页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第0页共35页第一章引言1
1液压机械手概述液压传动机械手是以压缩液体的压力来驱动执行机构运动的机械手
其主要特点是:介质源极为方便,输出力小,液压动作迅速,结构简单,成本低
但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压机械手的结构大,所以适用于高速、轻载、高温和粉尘大的环境中进行工作
液压技术有以下优点:(1)体积小、重量轻,因此惯性力较小,当突然过载或停车时,不会发生大的冲击;(2)能在给定范围内平稳的自动调节牵引速度,并可实现无极调速;(3)换向容易,在不改变电机旋转方向的情况下,可以较方便地实现工作机构旋转和直线往复运动的转换;(4)液压泵和液压马达之间用油管连接,在空间布置上彼此不受严格限制;(5)由于采用油液为工作介质,元件相对运动表面间能自行润滑,磨损小,使用寿命长;(6)操纵控制简便,自动化程度高;(7)容易实现过载保护
2液压机械手的设计要求1
2课题的设计要求本课题将要完成的主要任务如下:(1)机械手为通用机械手,因此相对于专用机械手来说,它的适用面相对较广
(2)选取机械手的座标型式和自由度
(3)设计出机械手的各执行机构,包括:手部、手腕、手臂等部件的设计
为了使通用性更强,手部设计成可更换结构,不仅可以应用于夹持式手指来抓取棒料工件,在工业需要的时候还可以用气流负压式吸盘来吸取板料工件
(4)液压传动系统的设计本课题将设计出机械手的液压传动系统,包括液压元器件的选取,液压回路的设计,并绘出液压原理图
(5)机械手的控制系统的设计本机械手拟采用可编程序控制器(PLC)对机械手进行控制,本课题将要选取PLC型号,根据机械手的工作流程编制出PLC程序,并画出梯形图
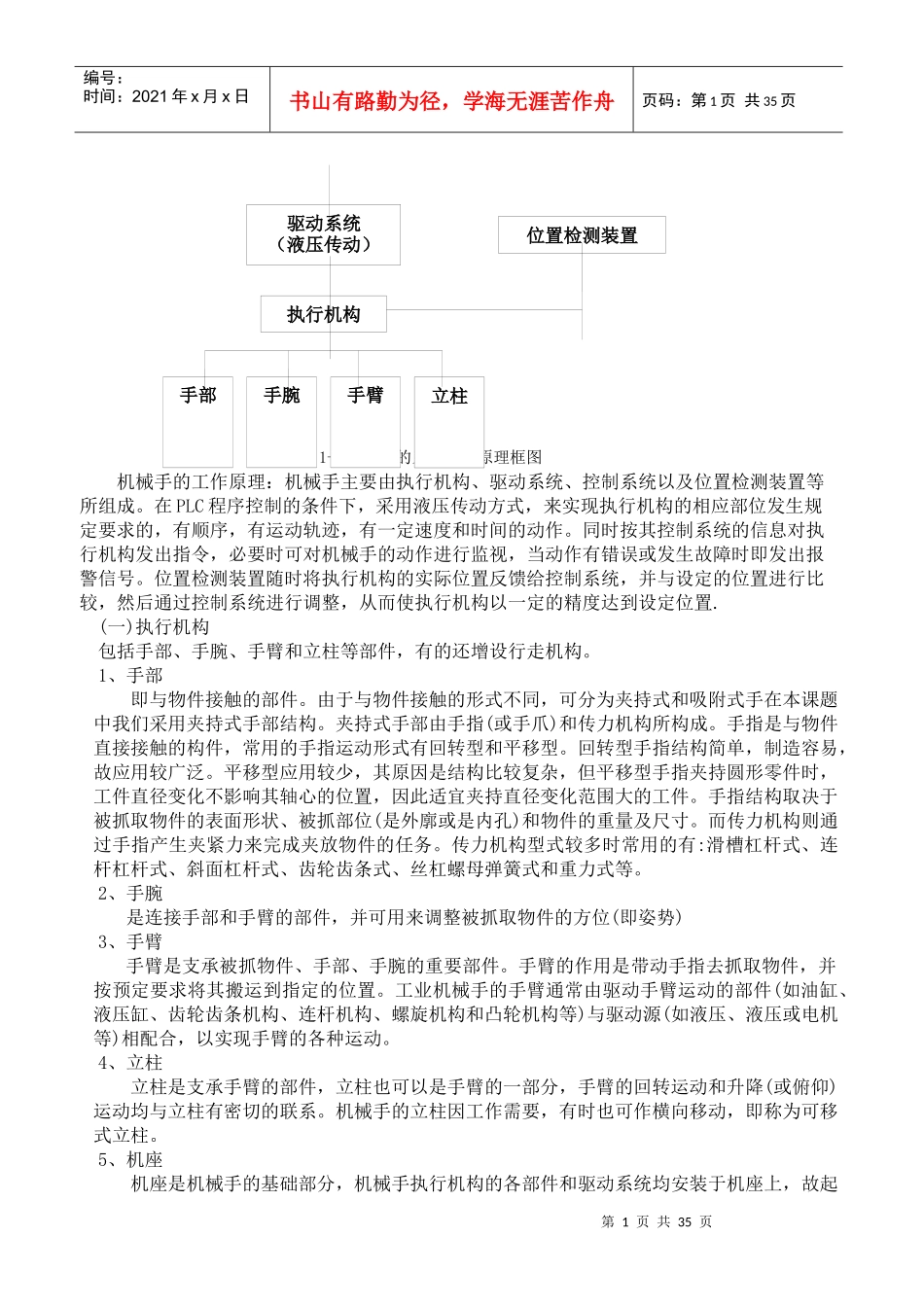
3机械手的系统工