第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共8页工业机器人机械系统设计机器人技术是利用计算机的记忆功能、编程功能来控制操作机自动完成工业生产中某一类指定任务的高新技术,是当今各国竞相发展的高技术内容之一
它是综合了当代机构运动学与动力学、精密机械设计发展起来的产物,是典型的机电一体化产品,工业机器人由操作机和控制器两大部分组成
操作机按计算机指令运动,可实现无人操作;控制器中计算机程序可依加工对象不同而从新设计,从而满足柔性生产的需要
机器人应用领域广泛,包括建筑、医疗、采矿、核能、农牧渔业、航空航天、水下作业、救火、环境卫生、教育、娱乐、办公、家用、军用等方面,工业机器人在国内主要应用于危险、有毒、有害的工作环境以及产品质量要求高(超洁、同一性)的重复性作业场合,如焊接、喷涂上下料、插件、防爆等
一、工业机器人的总体设计1.主体结构设计工业机器人主体结构设计的主要问题是选择由连杆件和运动副组成的坐标形式
工业机器人的坐标形式主要有直角坐标式、圆柱坐标式、球面坐标式、关节坐标式等
直角坐标式机器人主要用于生产设备的上下料,也可用于高精度的装配和检测作业
圆柱坐标式机器人主要有三个自由度:腰转,升降,手臂伸缩
手腕常采用两个自由度,绕手臂纵向轴转动与垂直的水平轴线转动
手腕若采用三个自由度,机器人总自由度达到六个
球面坐标式机器人也叫极坐标式机器人,具有较大的工作范围,设计和控制系统比较复杂
关节坐标式主体结构的三个自由度腰转关节、肩关节、肘关节全部是转动关节,手腕的三个自由度上的转动关节(俯仰、偏转和翻转)用来最后确定末端操作器的姿态,它是一种惯犯使用的拟人化的机器人
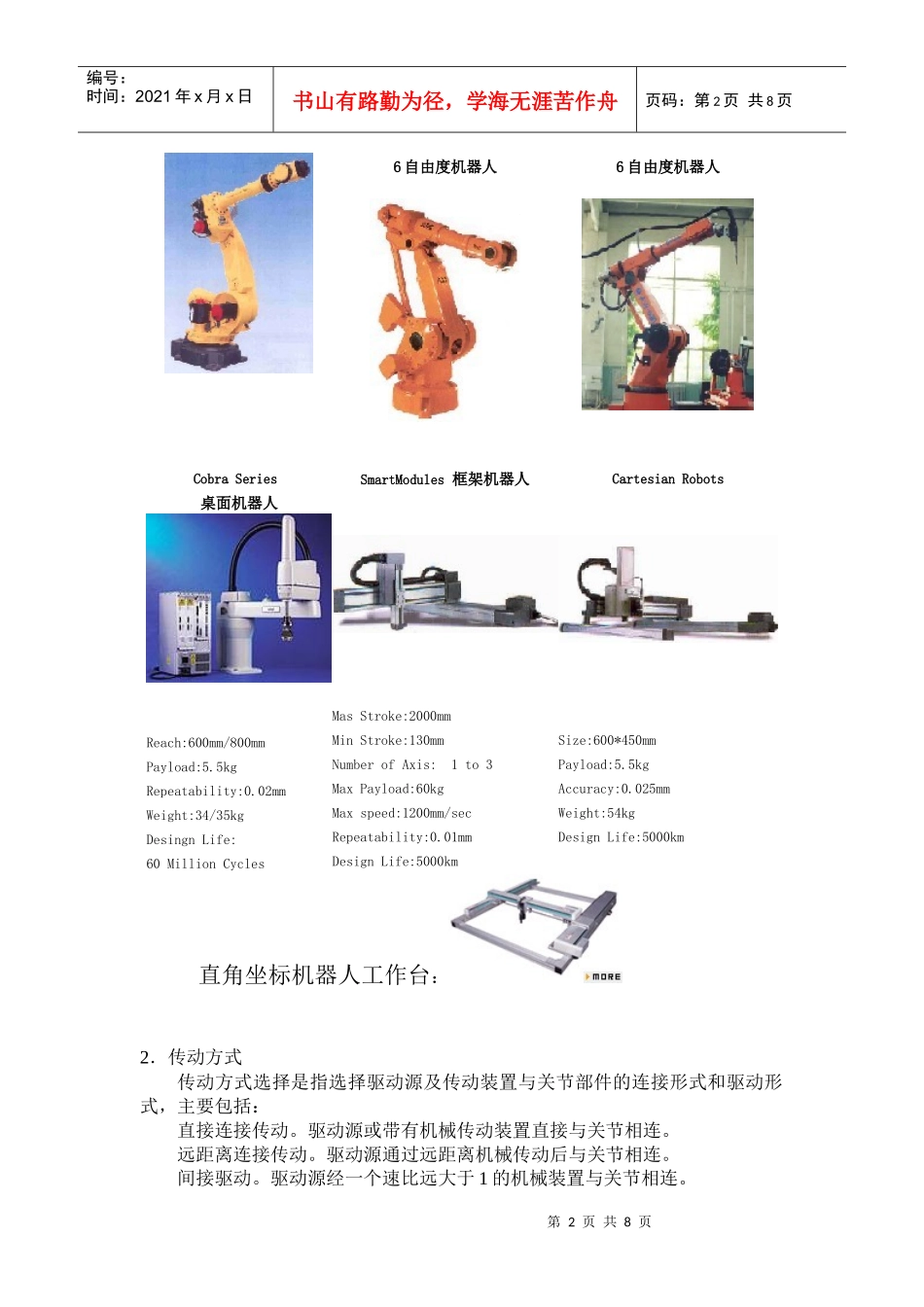
第2页共8页第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共8页6自由度机器人6自由度机器人CobraSeries桌面机器人Re