第十节导盲机器人(一)小明是位盲人学生
父母由于工作关系,不能天天接送小明上学,这该怎么办
小明的父母为小明定做了一台导盲机器人,让他带小明上学、放学及散步
但是机器人定做完成后,由于还没有程序的支持,所以还无法完成这个重任
下面就让我们一起为机器人写程序,让他能够领着小明上学上学、放学、散步
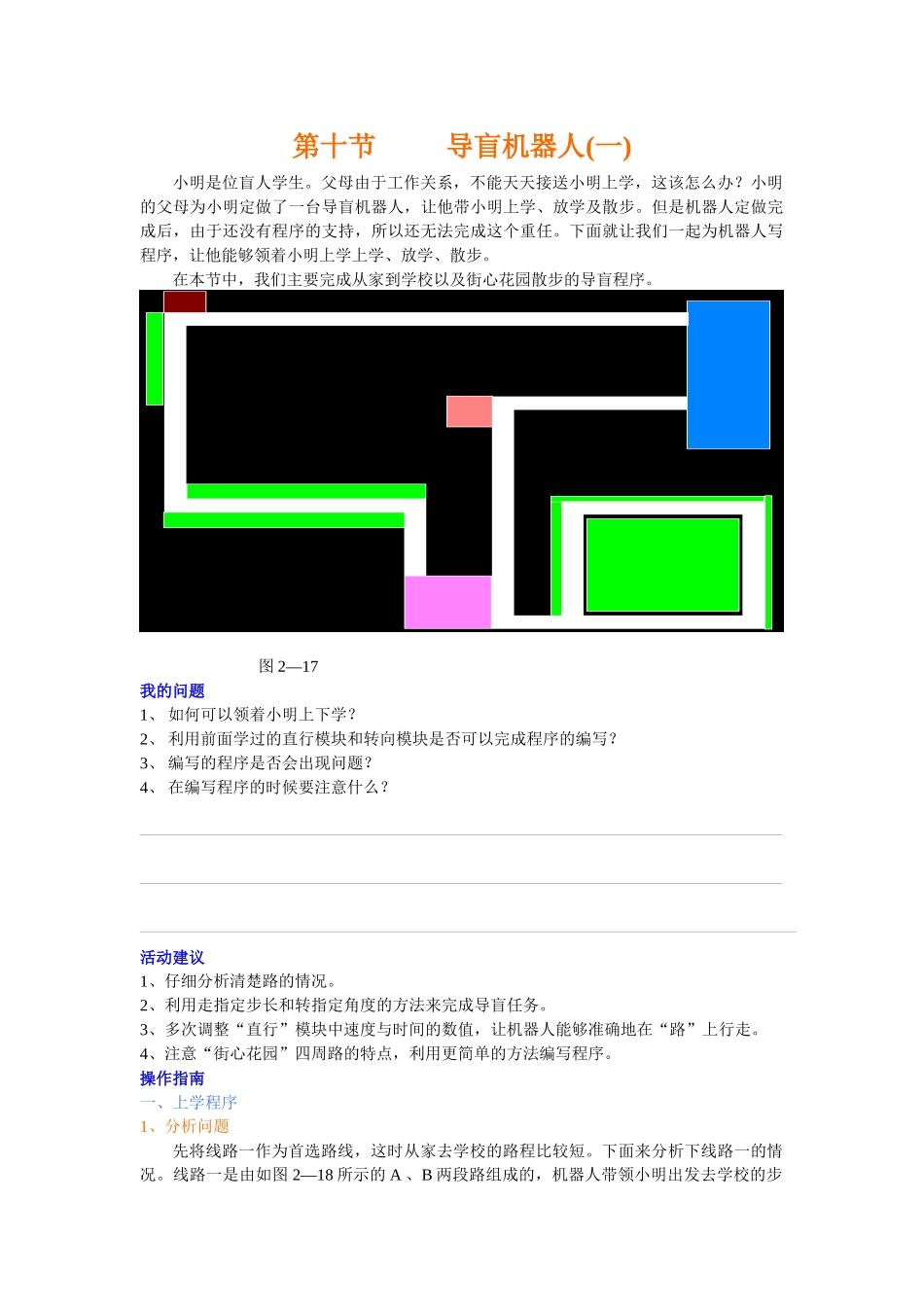
在本节中,我们主要完成从家到学校以及街心花园散步的导盲程序
图2—17我的问题1、如何可以领着小明上下学
2、利用前面学过的直行模块和转向模块是否可以完成程序的编写
3、编写的程序是否会出现问题
4、在编写程序的时候要注意什么
活动建议1、仔细分析清楚路的情况
2、利用走指定步长和转指定角度的方法来完成导盲任务
3、多次调整“直行”模块中速度与时间的数值,让机器人能够准确地在“路”上行走
4、注意“街心花园”四周路的特点,利用更简单的方法编写程序
操作指南一、上学程序1、分析问题先将线路一作为首选路线,这时从家去学校的路程比较短
下面来分析下线路一的情况
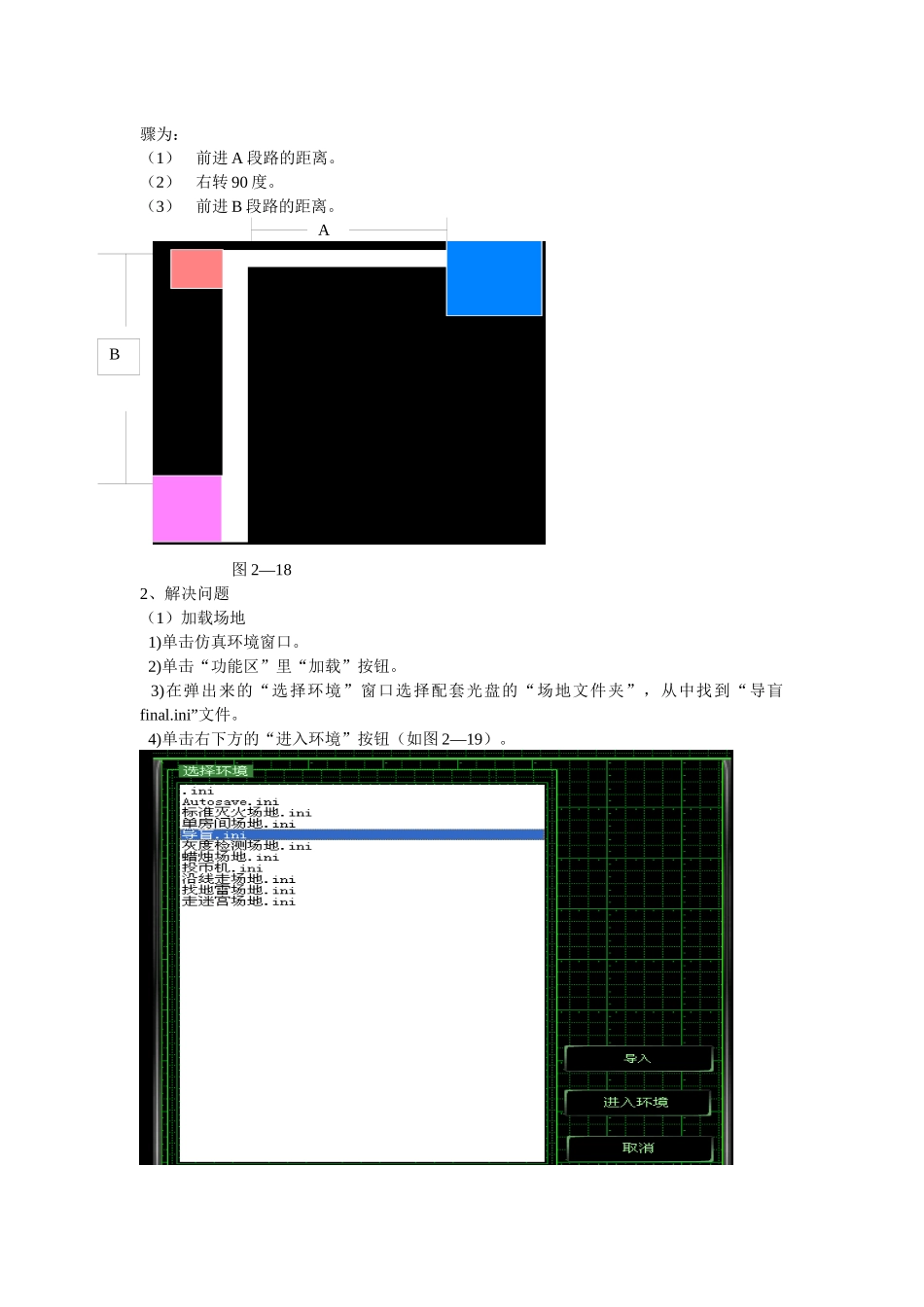
线路一是由如图2—18所示的A、B两段路组成的,机器人带领小明出发去学校的步绿地家学校骤为:(1)前进A段路的距离
(2)右转90度
(3)前进B段路的距离
A图2—182、解决问题(1)加载场地1)单击仿真环境窗口
2)单击“功能区”里“加载”按钮
3)在弹出来的“选择环境”窗口选择配套光盘的“场地文件夹”,从中找到“导盲final
ini”文件
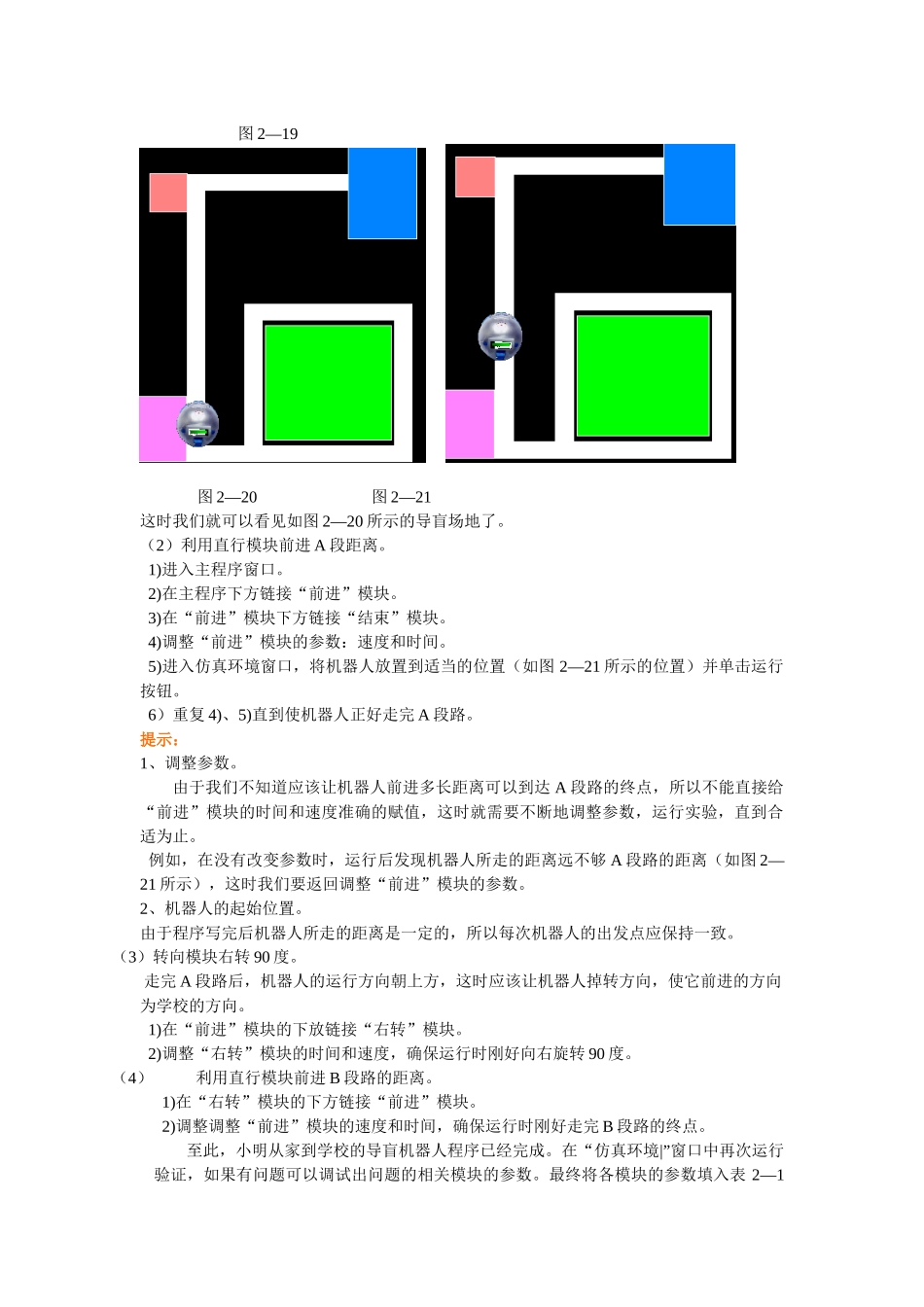
4)单击右下方的“进入环境”按钮(如图2—19)
B图2—19图2—20图2—21这时我们就可以看见如图2—20所示的导盲场地了
(2)利用直行模块前进A段距离
1)进入主程序窗口
2)在主程序下方链接“前进”模块
3)在“前进”模块下方链接“结束”模块
4)调整“前进”模块的参数:速度和时间
5)进入仿真环境窗口,将机器人放置到适当的位置(如图2—21所示的位置)并单击运行按钮