第十章非线性系统§10
1与线性系统的差异线性系统与非线性系统的不同之处在于:1
非线性系统的运动是由一个非线性微分方程控制的,但是很多非线性方程都不存在精确解
一个非线性系统可能不只一个平衡点,而平衡点可能是稳定的,也可能是不稳定的
非线性系统是否存在稳态运动取决于初始条件
非线性系统的自由振动周期由初始条件决定,这就意味着自由振动的频率依赖于自由振动的振幅
非线性系统的共振出现在激发频率不同于系统的线性固有频率处,在一个三维非线性系统中,当激发频率为系统线性固有频率的1/3时,产生超频共振;当激发频率为系统线性固有频率近三倍时,就产生亚频共振
线性叠加原理不能用来分析受多频激励的非线性系统,共振的组合是对应于激发频率的近似组合
对应于固有频率的近似组合,在多自由度的连续系统中存在内共振
在非线性系统中,周期激励可能会引起非周期响应,由于一些特定的参数值,这种混沌运动出现在很多非线性系统中
1定性分析状态平面或相位平面是速度和位移在整个运动过程中的关系曲线,通过在平衡点的邻域内将控制微分方程线性化,可以检验平衡点的性质及其稳定性(见题10
2),平衡点的各种类型如图10
3达芬方程达芬方程23Fsinrt(10
1)是一个无量纲方程
它作为一个模型可用于求解三维非线性系统
如果为正,则表示一个硬弹簧的响应;如果为负,则表示一个软弹簧系统的响应
一个系统自由振动的振幅关系由达芬方程决定,它可以用扰动方法近似表示为:31A2O(2)(10
2)8其中是固有频率的无量纲化(对于线性系统=1),A是振幅,分析共振附近达芬方程的受迫响应可以设r1(10
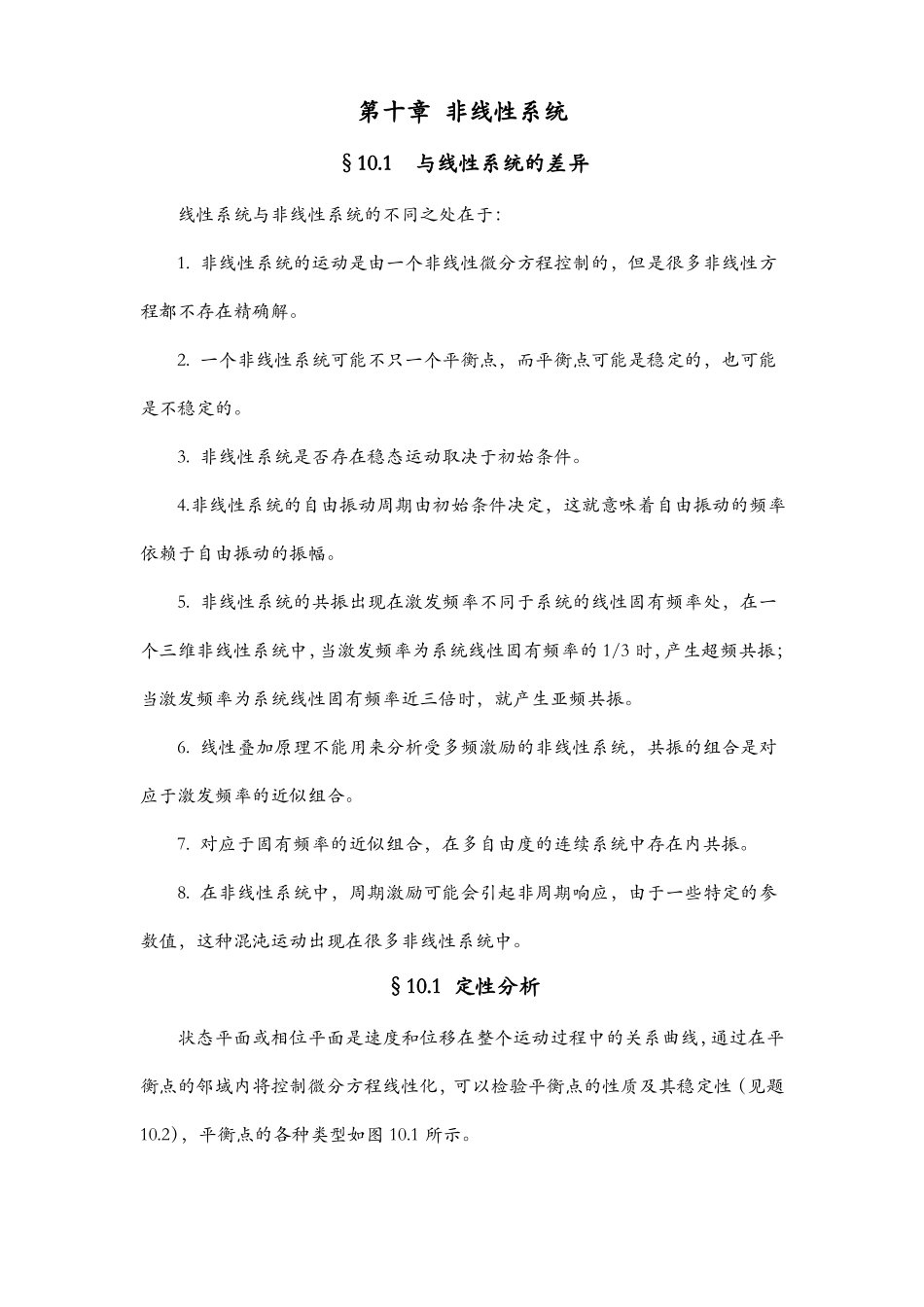
3)则稳态振幅的定义方程就可近似表示为34A[A2]F2(10
4)8222方程(10
4)在图10