6+2kr23n0I00—2krr31011—2krr3=0=01
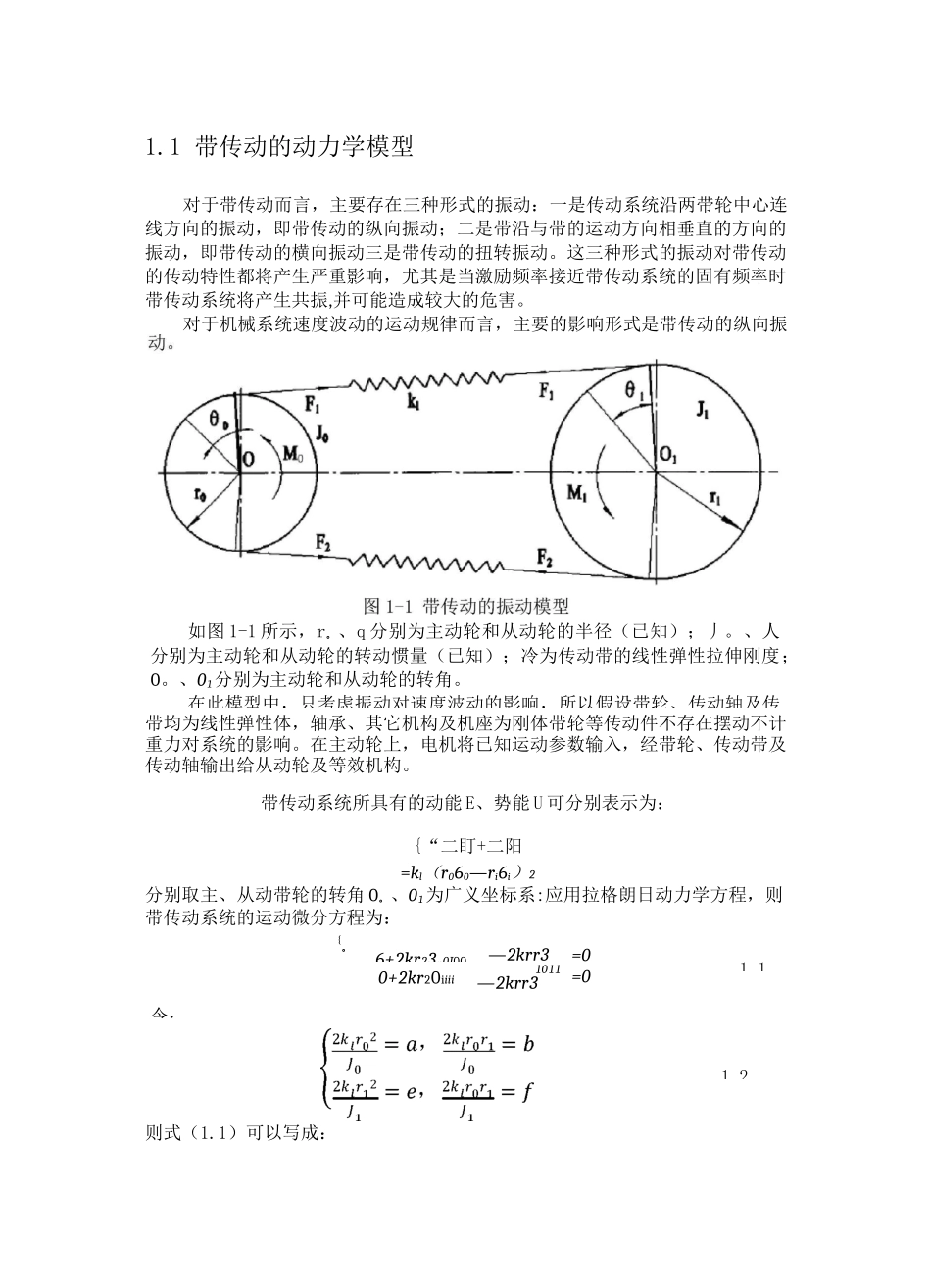
1带传动的动力学模型对于带传动而言,主要存在三种形式的振动:一是传动系统沿两带轮中心连线方向的振动,即带传动的纵向振动;二是带沿与带的运动方向相垂直的方向的振动,即带传动的横向振动三是带传动的扭转振动
这三种形式的振动对带传动的传动特性都将产生严重影响,尤其是当激励频率接近带传动系统的固有频率时带传动系统将产生共振,并可能造成较大的危害
对于机械系统速度波动的运动规律而言,主要的影响形式是带传动的纵向振带均为线性弹性体,轴承、其它机构及机座为刚体带轮等传动件不存在摆动不计重力对系统的影响
在主动轮上,电机将已知运动参数输入,经带轮、传动带及传动轴输出给从动轮及等效机构
带传动系统所具有的动能E、势能U可分别表示为:{“二盯+二阳=kl(r060—ri6i)2分别取主、从动带轮的转角0
、01为广义坐标系:应用拉格朗日动力学方程,则带传动系统的运动微分方程为:则式(1
1)可以写成:如图1-1所示,r
、q分别为主动轮和从动轮的半径(已知);丿
、人分别为主动轮和从动轮的转动惯量(已知);冷为传动带的线性弹性拉伸刚度;0
、01分别为主动轮和从动轮的转角
在此模型中,只考虑振动对速度波动的影响,所以假设带轮、传动轴及传0+2kr20iiii1
5){(a-p2)Xi—bX2=0J—fX1+(e-p2)X2=0动情形
要使£和X2有非零解,式(1
5)的系数行列式必须等于0,则:a—p2—b=(a—p2)(e—p2)—bf=01
(0+a0-bg=o{001[0i+e0i-f0Q=0上式是带传动系统振动模型的运动方程
2带传动的固有频率设运动方程(1
3)的解为:{%=Xis\n(pt+^}B=Xsin(pt+申)式中,振幅£和%2、频率卩与相位角