寻光机器人课题寻光机器人单元6学科信息技术年级学习目标1
认识光敏传感器,能够了解传感器的工作原理
编写寻光机器人程序,完成相应的要求
模拟仿真机器人寻光
搭建与调试寻光机器人
重点模拟仿真机器人寻光
难点搭建与调试寻光机器人
教学过程教学环节教师活动学生活动设计意图导入新课以对话的方式展开引入新的课题:男:玲玲,你看过神话故事《夸父逐日》吗
女:看过,我知道夸父与太阳才跑,一直追到太阳落下的地方
男:我今天带来的机器人也能追着太阳跑
简单介绍一下夸父追日的故事:夸父为追求光明,顽强不息,坚持不懈,一直追到太阳落下的地方
我们要制作的机器人也能够根据周围环境,判断光源的方向,并指挥它的双脚向着光明前进,最终追赶到“太阳”
认真听讲,仔细思考,交流分享自己的看法
激发学生兴趣,导入课题
讲授新课一、认识光敏传感器人类可以通过自己的眼睛,在黑暗中找到光源
若要机器人寻找光源,就需要给机器人装上能看见光亮的“眼睛”——光敏传感器
他有两个能判断环境光线强弱的光敏传感器探头,主要功能是判断哪边的光线强
了解光敏的传感器的几个组成部分:可调电阻、传感器连接线、光敏传感器左探头、光敏传感器右探头
长见识:当外界环境光线的强、弱发生变化的时候,传感器的也跟随发生相应的改变,并把这种变化传输给机器人的微电脑
光敏传感器只能传送给微电脑两种电信号:一种是0,表示做光敏探头组识别到的光线比较强;另一种是1,表示又光敏探头组识别到的光线比较强
二、编写寻光机器人程序认真听讲、仔细思考,动手操作程序,总结经验
提高学生的动手能力,让学生了解光敏传感器的原理,激发学生对寻光机器人的兴趣
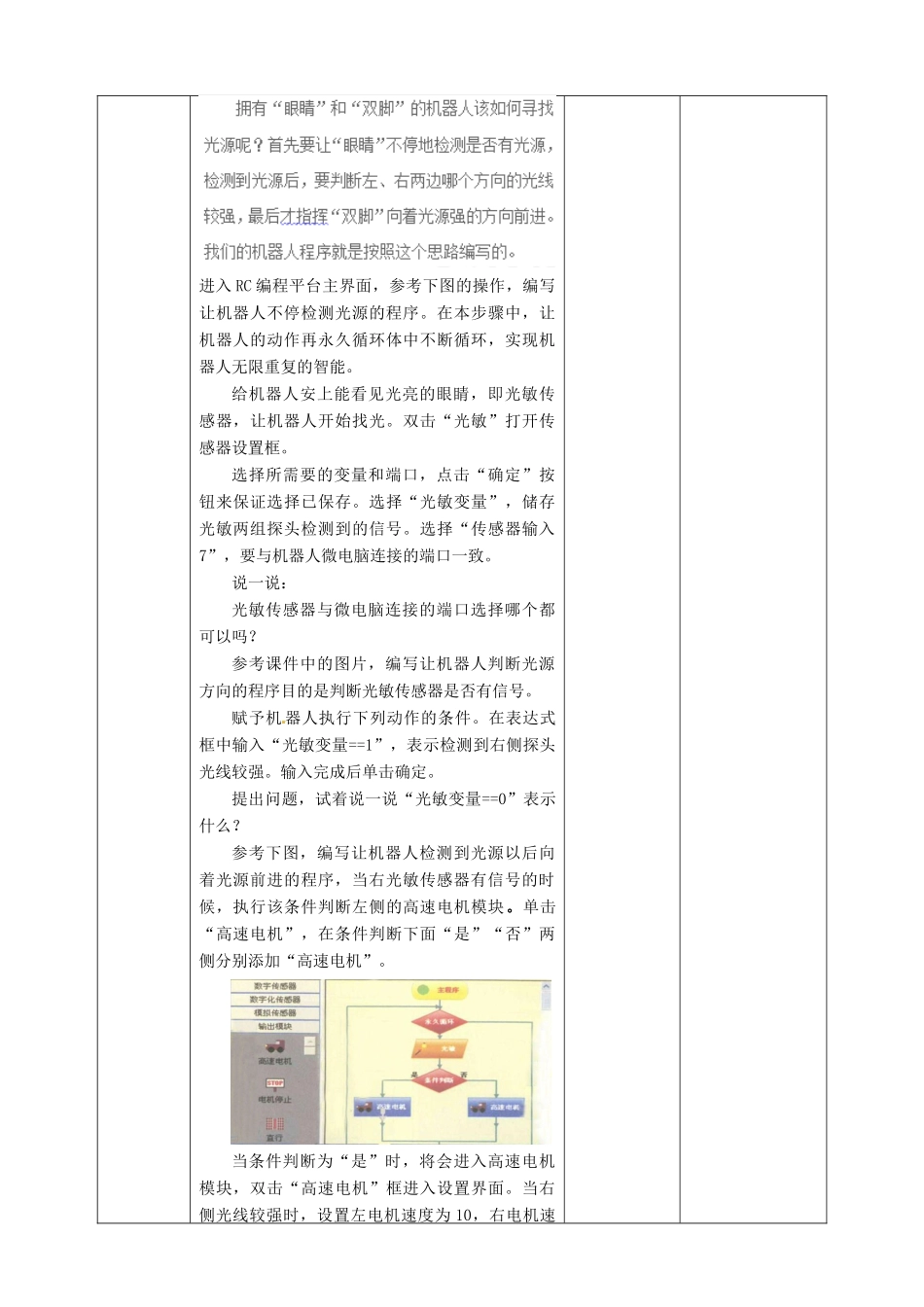
进入RC编程平台主界面,参考下图的操作,编写让机器人不停检测光源的程序
在本步骤中,让机器人的动作再永久循环体中不断循环,实现机器人无限重复的智能
给机器人安上能看见光亮的眼睛,即光敏传感器,让机器人开始