人工变量的引入及其解法当约束条件为“”型,引入剩余变量和人工变量•由于所添加的剩余变量的技术系数为1,不能作为初始可行基变量,为此引入一个人为的变量(注意,此时约束条件已为“=”型),以便取得初始基变量,故称为人工变量•由于人工变量在原问题的解中是不能存在的,应尽快被迭代出去,因此人工变量在目标函数中对应的价值系数应具有惩罚性,称为罚系数
罚系数的取值视解法而定•两种方法–大M法–二阶段法minz=-3x1+x2+x3s
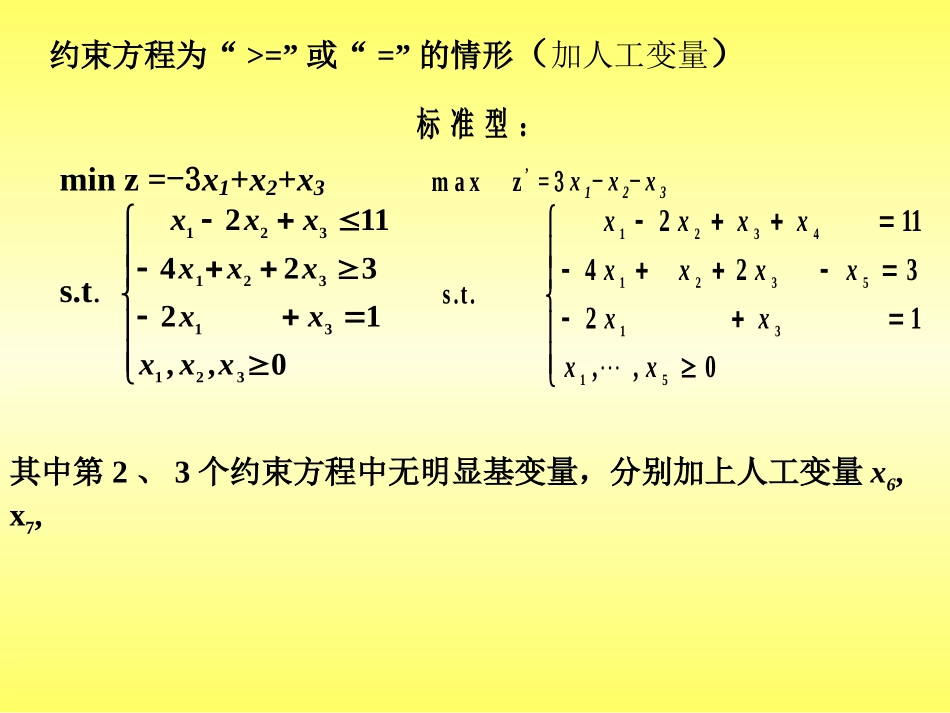
01232411232131321321x,x,xxxxxxxxx标准型:maxz’=3x1-x2-x3s
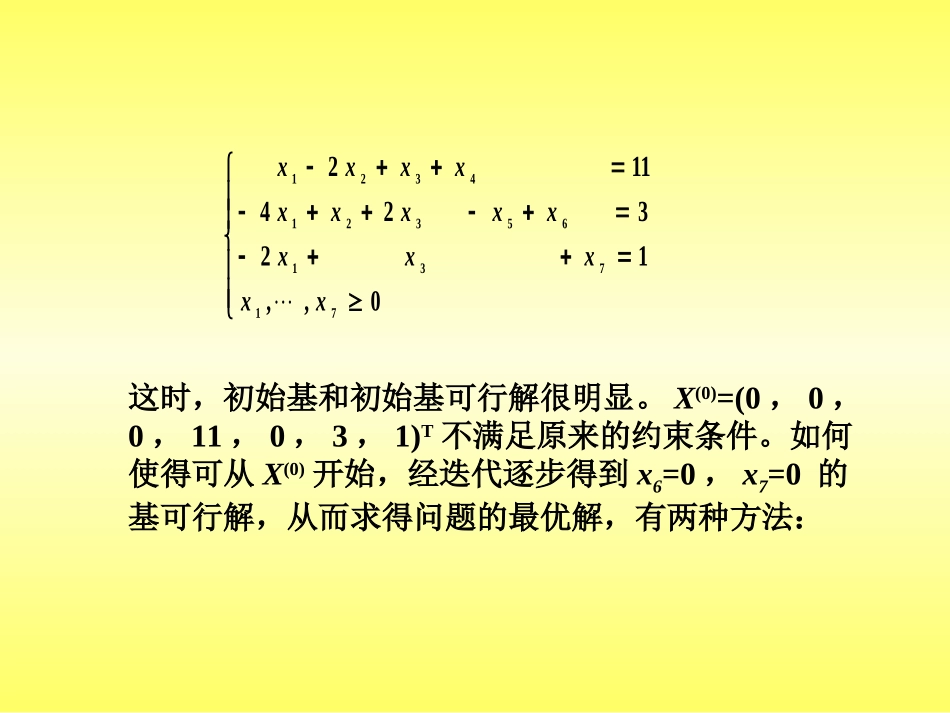
012324112513153214321x,,xxxxxxxxxxx其中第2、3个约束方程中无明显基变量,分别加上人工变量x6,x7,约束方程为“>=”或“=”的情形(加人工变量)01232411271731653214321x,,xxxxxxxxxxxxx这时,初始基和初始基可行解很明显
X(0)=(0,0,0,11,0,3,1)T不满足原来的约束条件
如何使得可从X(0)开始,经迭代逐步得到x6=0,x7=0的基可行解,从而求得问题的最优解,有两种方法:01232411271731653214321x,,xxxxxxxxxxxxx反之,若加了人工变量的问题解后最优解中仍含人工变量为基变量,便说明原问题无可行解
例的单纯形表格为:只要原问题有可行解,随着目标函数向最大化方向的改善,人工变量一定会逐步换出基,从而得到原问题的基可行解,进而得到基最优解
大M法在目标函数中加上惩罚项
max=3x1-x2-x3-Mx6-Mx7其中M为充分大的正数
Cj3-1-100-M-M