4-1图示为一轧纸钳,其尺寸如图所示
工作时上、下钳口保持平行,设手握力为P,求作用于纸片上的力Q的大小
解:1)取整个轧纸钳为研究对象
2)系统约束为理想约束
3)主动力P和Q分别作用在B点和A点
4)取A点和B点的无穷小真实位移为虚位移和
5)建立虚位移和的关系
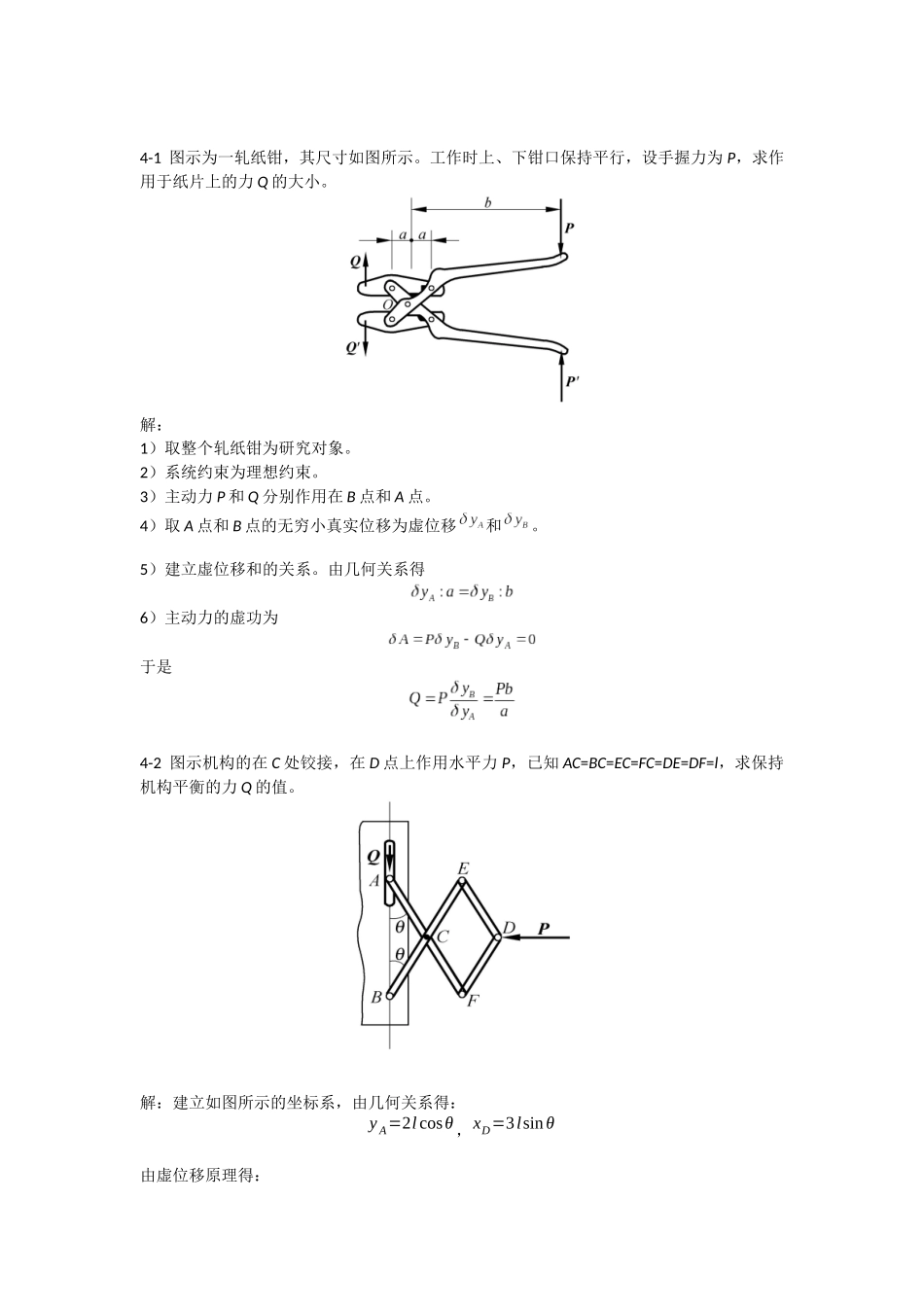
由几何关系得6)主动力的虚功为于是4-2图示机构的在C处铰接,在D点上作用水平力P,已知AC=BC=EC=FC=DE=DF=l,求保持机构平衡的力Q的值
解:建立如图所示的坐标系,由几何关系得:yA=2lcosθ,xD=3lsinθ由虚位移原理得:QδyA+PδxD=0所以:Q=32Pctgθ4-3用滑轮机构将两物体A和B悬挂如图,并设物体B保持水平
如绳和滑轮的重量不计,求两物体平衡时,重量PA和PB的关系
解:取物块A、B为研究对象
约束为理想约束
由虚位移原理可得:PBδrB+PAδrA=0由如图所示的滑轮组可得虚位移关系为:−2δrB:δrA=2:5即:δrA=−5δrB所以:PB=5PA4-4反平行四边形机构ABCD中的杆AB、CD和BC用铰链B和C互相连接,同时又用铰链A和D连在机架AD上
在杆CD的铰链C处作用着水平力FC
在铰链B沿垂直于杆AB的方向作用有力FB,机构在图示位置处于平衡
设,,∠ABC=∠ADC=90°,∠DCB=30°
求FB的大小
xDrFFyBr解:根据题意,选三根杆组成的整体为研究对象,约束均为理想约束,主动力为FCF及B
质系平衡,则由虚位移原理,有又由运动学知识,(δrC/δrB1)=(vC/vB1)=1/(cosπ/3)其中δrB1v及B1是沿CB杆方向的分量
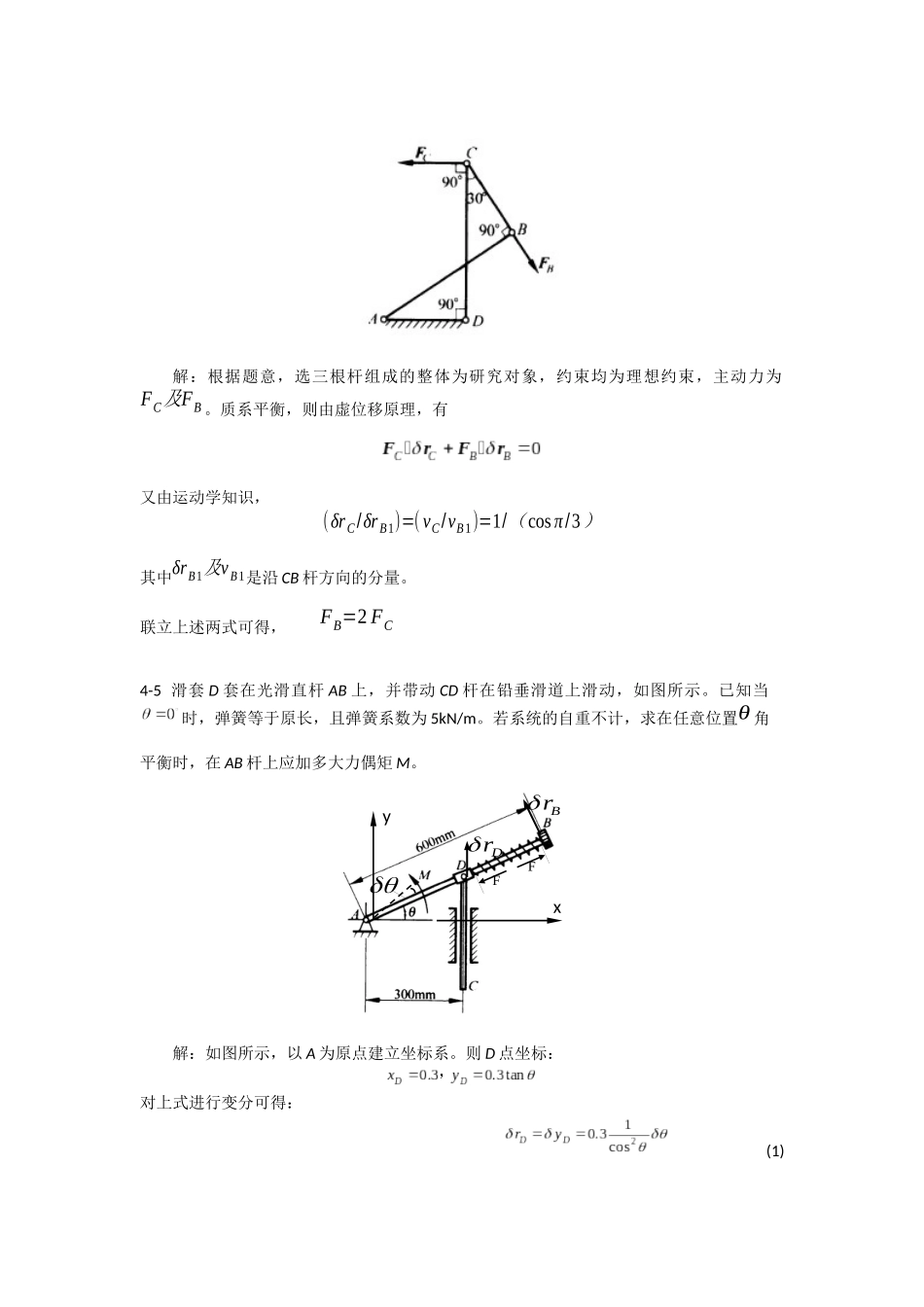
联立上述两式可得,FB=2FC4-5滑套D套在光滑直杆AB上,并带动CD杆在铅垂滑道上滑动,如图所示
已知当时,弹簧等于原长,且弹簧系数为5kN/m
若系统的自重不计,求在任意位置θ角平衡时,在AB杆