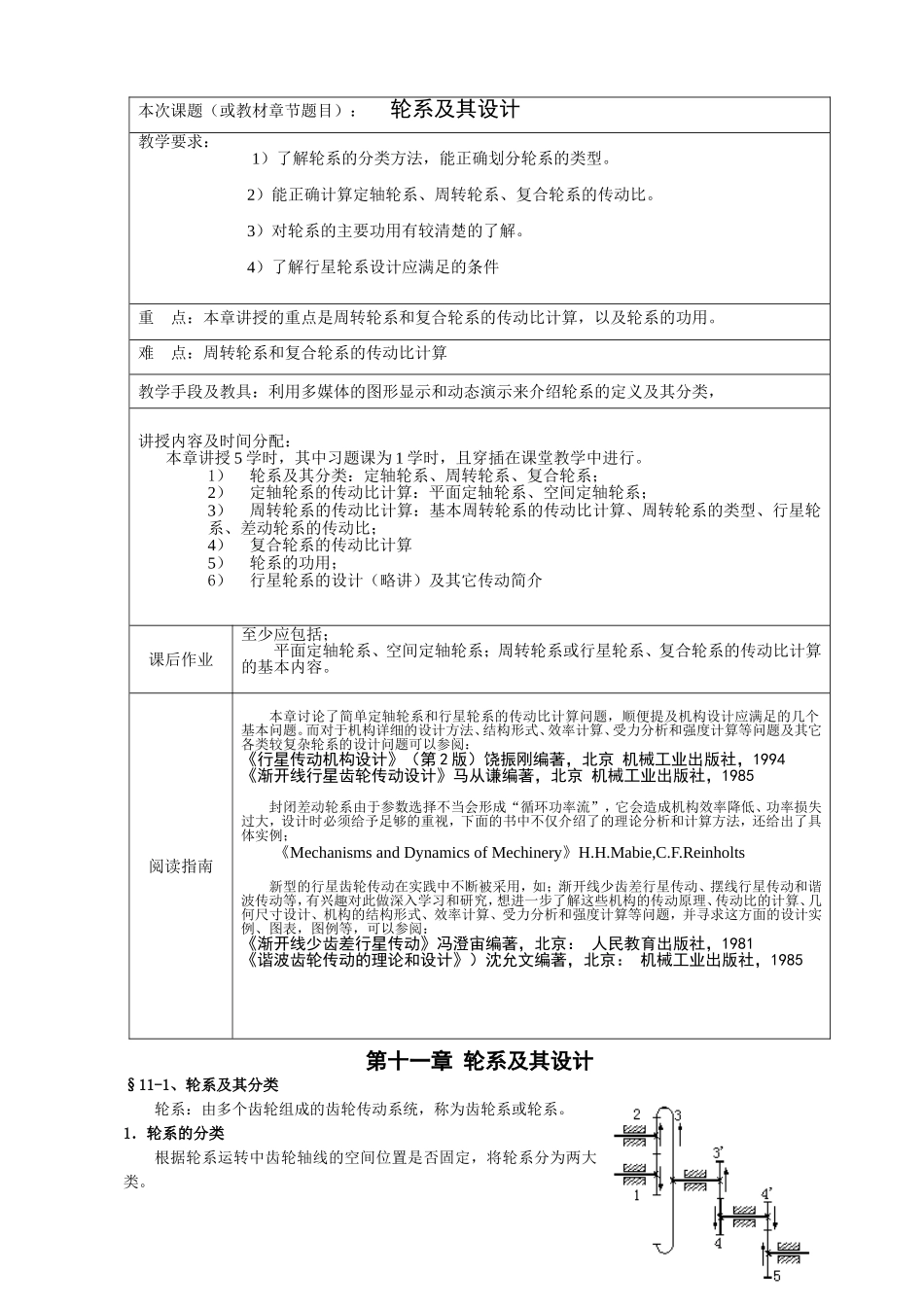
第十一章轮系及其设计§11-1、轮系及其分类轮系:由多个齿轮组成的齿轮传动系统,称为齿轮系或轮系
1.轮系的分类根据轮系运转中齿轮轴线的空间位置是否固定,将轮系分为两大类
本次课题(或教材章节题目):轮系及其设计教学要求:1)了解轮系的分类方法,能正确划分轮系的类型
2)能正确计算定轴轮系、周转轮系、复合轮系的传动比
3)对轮系的主要功用有较清楚的了解
4)了解行星轮系设计应满足的条件重点:本章讲授的重点是周转轮系和复合轮系的传动比计算,以及轮系的功用
难点:周转轮系和复合轮系的传动比计算教学手段及教具:利用多媒体的图形显示和动态演示来介绍轮系的定义及其分类,讲授内容及时间分配:本章讲授5学时,其中习题课为1学时,且穿插在课堂教学中进行
1)轮系及其分类:定轴轮系、周转轮系、复合轮系;2)定轴轮系的传动比计算:平面定轴轮系、空间定轴轮系;3)周转轮系的传动比计算:基本周转轮系的传动比计算、周转轮系的类型、行星轮系、差动轮系的传动比;4)复合轮系的传动比计算5)轮系的功用;6)行星轮系的设计(略讲)及其它传动简介课后作业至少应包括;平面定轴轮系、空间定轴轮系;周转轮系或行星轮系、复合轮系的传动比计算的基本内容
阅读指南本章讨论了简单定轴轮系和行星轮系的传动比计算问题,顺便提及机构设计应满足的几个基本问题
而对于机构详细的设计方法、结构形式、效率计算、受力分析和强度计算等问题及其它各类较复杂轮系的设计问题可以参阅:《行星传动机构设计》(第2版)饶振刚编著,北京机械工业出版社,1994《渐开线行星齿轮传动设计》马从谦编著,北京机械工业出版社,1985封闭差动轮系由于参数选择不当会形成“循环功率流”,它会造成机构效率降低、功率损失过大,设计时必须给予足够的重视,下面的书中不仅介绍了的理论分析和计算方法,还给出了具体实例;《MechanismsandDynamicsofMechine