电力电子技术21:47:5913
6晶闸管直流电动机系统3
1工作于整流状态时3
2工作于有源逆变状态时3
3直流可逆电力拖动系统PDF文件使用"pdfFactoryPro"试用版本创建www
fineprint
cn电力电子技术21:47:592•晶闸管直流电动机系统——晶闸管可控整流装置带直流电动机负载组成的系统
–是电力拖动系统中主要的一种
–是可控整流装置的主要用途之一
对该系统的研究包括两个方面:其一是在带电动机负载时整流电路的工作情况
其二是由整流电路供电时电动机的工作情况
本节主要从第二个方面进行分析
PDF文件使用"pdfFactoryPro"试用版本创建www
fineprint
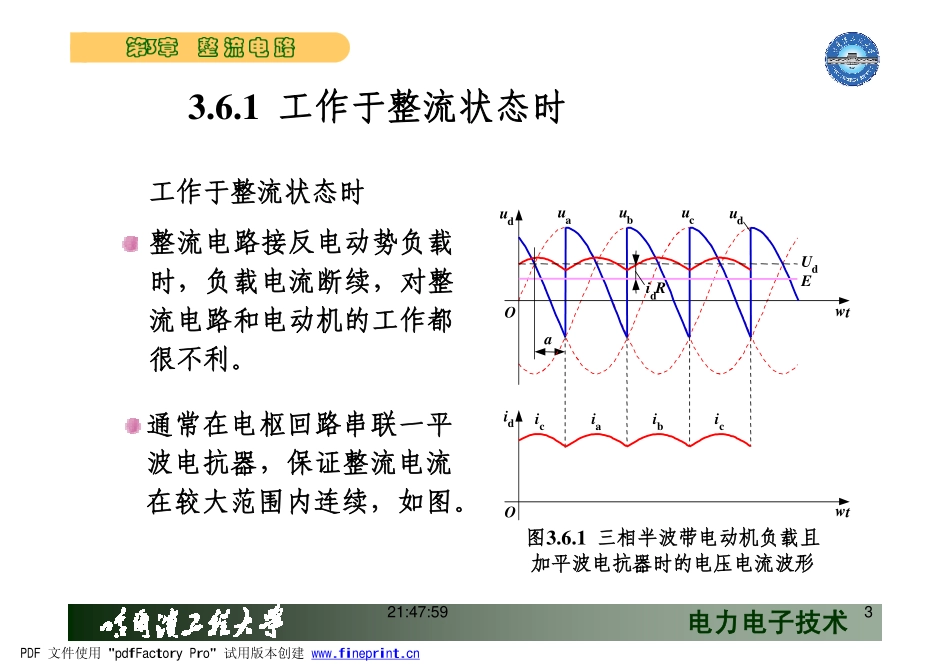
cn电力电子技术21:47:593工作于整流状态时整流电路接反电动势负载时,负载电流断续,对整流电路和电动机的工作都很不利
1三相半波带电动机负载且加平波电抗器时的电压电流波形通常在电枢回路串联一平波电抗器,保证整流电流在较大范围内连续,如图
udOidwtuaubucaudOiaibicicwtEUdidR3
1工作于整流状态时PDF文件使用"pdfFactoryPro"试用版本创建www
fineprint
cn电力电子技术21:47:594此时,整流电路直流电压的平衡方程为式中,
为电动机的反电动势负载平均电流Id所引起的各种电压降,包括:–变压器的电阻压降–电枢电阻压降–由重叠角引起的电压降晶闸管本身的管压降,它基本上是一恒值
系统的两种工作状态:电流连续工作状态电流断续工作状态UIREUdMd∆++=Σπ23BMBXRRR++=ΣMEdIRΣBdRIMdRI)2(3πdBIXU∆PDF文件使用"pdfFactoryPro"试用版本创建www
fineprint
cn电力电子技术21:47:595转速与电流的机械特性关系式为1)电流连续时电动机的