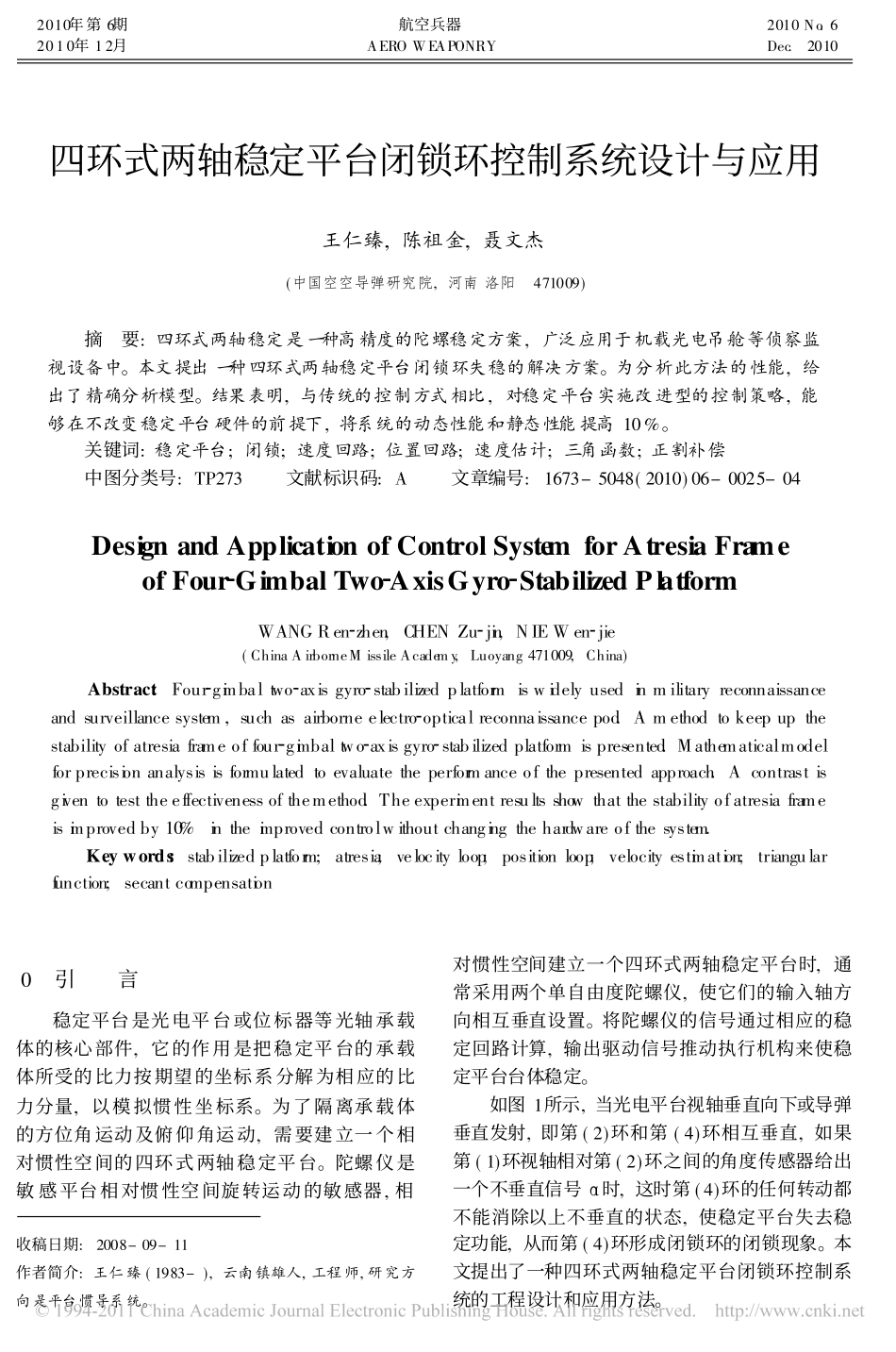
四环式两轴稳定平台闭锁环控制系统设计与应用王仁臻,陈祖金,聂文杰(中国空空导弹研究院,河南洛阳�471009)��摘�要:四环式两轴稳定是一种高精度的陀螺稳定方案,广泛应用于机载光电吊舱等侦察监视设备中
本文提出一种四环式两轴稳定平台闭锁环失稳的解决方案
为分析此方法的性能,给出了精确分析模型
结果表明,与传统的控制方式相比,对稳定平台实施改进型的控制策略,能够在不改变稳定平台硬件的前提下,将系统的动态性能和静态性能提高10%
关键词:稳定平台;闭锁;速度回路;位置回路;速度估计;三角函数;正割补偿中图分类号:TP273��文献标识码:A��文章编号:1673-5048(2010)06-0025-04DesignandApplicationofControlSystemforAtresiaFrameofFour�GimbalTwo�AxisGyro�StabilizedPlatformWANGRen�zhen,CHENZu�jin,NIEWen�jie(ChinaAirborneMissileAcademy,Luoyang471009,China)��Abstract:Four�gimbaltwo�axisgyro�stabilizedplatformiswidelyusedinmilitaryreconnaissanceandsurveillancesystem,suchasairborneelectro�opticalreconnaissancepod
Amethodtokeepupthestabilityofatresiaframeoffour�gimbaltwo�axisgyro�stabilizedplatformispresented
Mathematicalmodelforprecisionanalysisisformulatedtoevaluatethepe