FisherDVC5000/6000系列智能定位器一、FisherDVC5000/6000系列定位器原理FisherDVC5000/6000系列智能定位器的结构原理图如下图所示智能定位器结构原理图其工作原理是,控制器来的控制信号经端子盒进到印刷线路板子模块,在这里被微处理器读取后经数字算法处理后转换成模拟量后送给I/P转换器
当信号改变时I/P转换器的线圈和衔铁之间的磁吸引力改变,并因此改变了喷嘴挡板间的距离进而改变了喷嘴背压,该背压经放大器放大后送给执行机构并通过执行机构改变阀杆的位置
阀行程传感器通过反馈杆感受阀杆位置的变化,并将此信号反给印刷线路板组件参与计算
当阀杆位置达到正确位置,阀杆位置信号反到印刷线路板组建,经过处理后使I/P驱动信号稳定下来,则喷嘴背压稳定下来,则到执行机构的输出力也稳定下来阀杆位置不再变化
二、安装要点Fisher智能定位器对安装要求较严格,以往的经验表明,以前的几次阀门校验出错都是因为安装错误造成的
Fisher智能定位器的反馈杆如图所示其上有A、B两个孔来确定连接位置
当阀门为风开阀时,定位销钉穿过A孔插入定位器表体上的固定孔,当阀门为风关阀时,定位销钉穿过B孔插入定位器表体上的固定孔来确定连接位置
然后将十字架的连接杆放入反馈杆的槽内,其所放位置与该阀的行程相对应
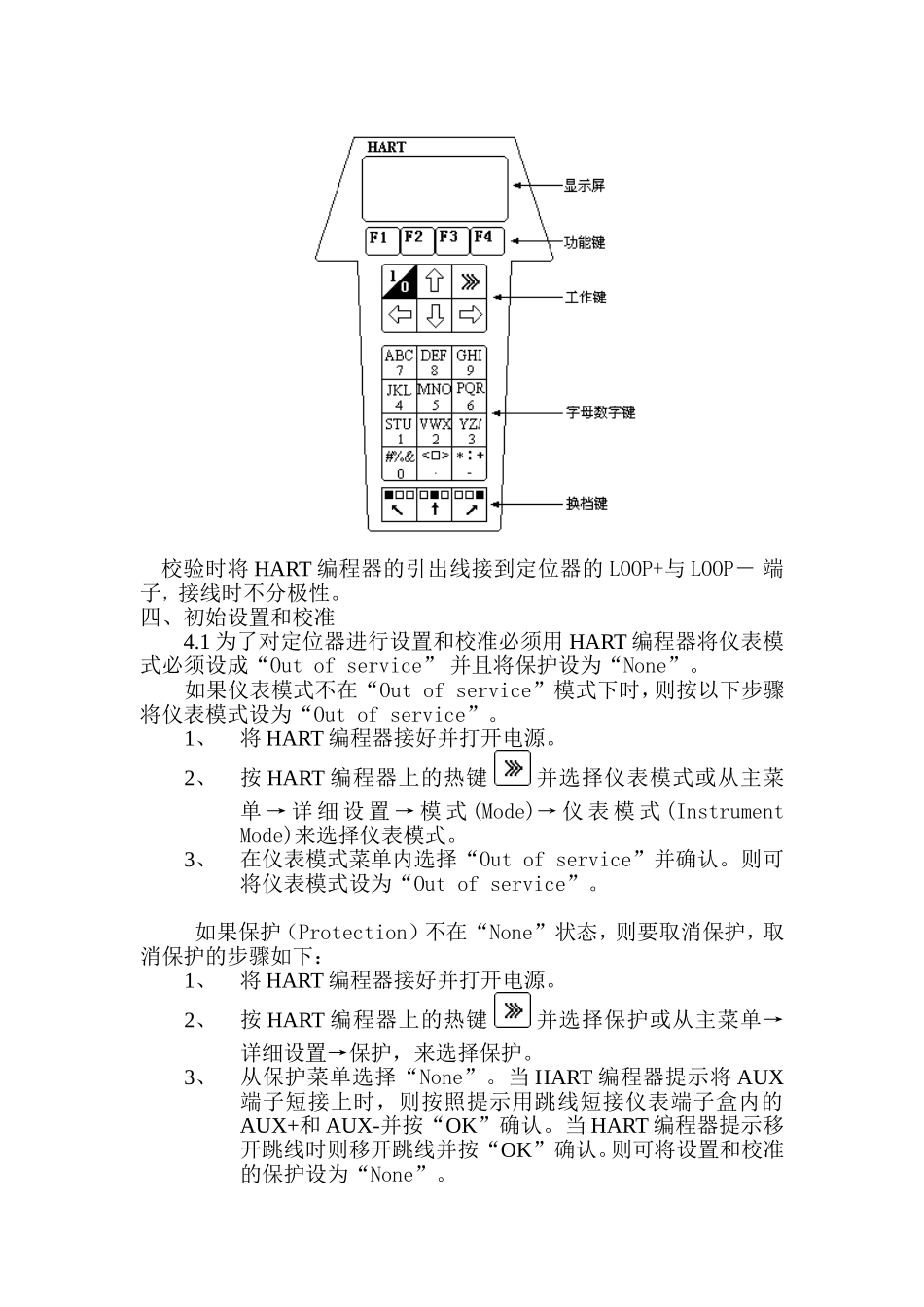
三、275型HART通讯器简介HART通讯器各部分功能如图所示:校验时将HART编程器的引出线接到定位器的LOOP+与LOOP-端子,接线时不分极性
四、初始设置和校准4
1为了对定位器进行设置和校准必须用HART编程器将仪表模式必须设成“Outofservice”并且将保护设为“None”
如果仪表模式不在“Outofservice”模式下时,则按以下步骤将仪表模式设为“Outofservice”
1、将HART编程器接好并打开电源
2、按HART编程器上的热键并选择仪表