计算机控制系统实验报告实验一模拟式小功率随动系统的实验调试实验二A/D、D/A接口的使用和数据采集实验三中断及采样周期的调试实验四计算机控制系统的实验调试姓名:陈启航学号:13031144同组人:吴振环陈秋鹏李恺指导教师:袁少强日期:2016年6月16日实验一二阶系统的电子模拟及时域响应的动态测试一、实验目的1
熟悉反馈控制系统的结构和工作原理,进一步了解位置随动系统的特点
掌握判别闭环系统的反馈极性的方法
了解开环放大倍数对稳定性的影响及对系统动态特性的影响,对静态误差的影响
二、实验内容1
连接元件构成位置随动系统;2
利用计算机内的采样及显示程序,显示并分析输出的响应结果;3
反复调试达到设计要求
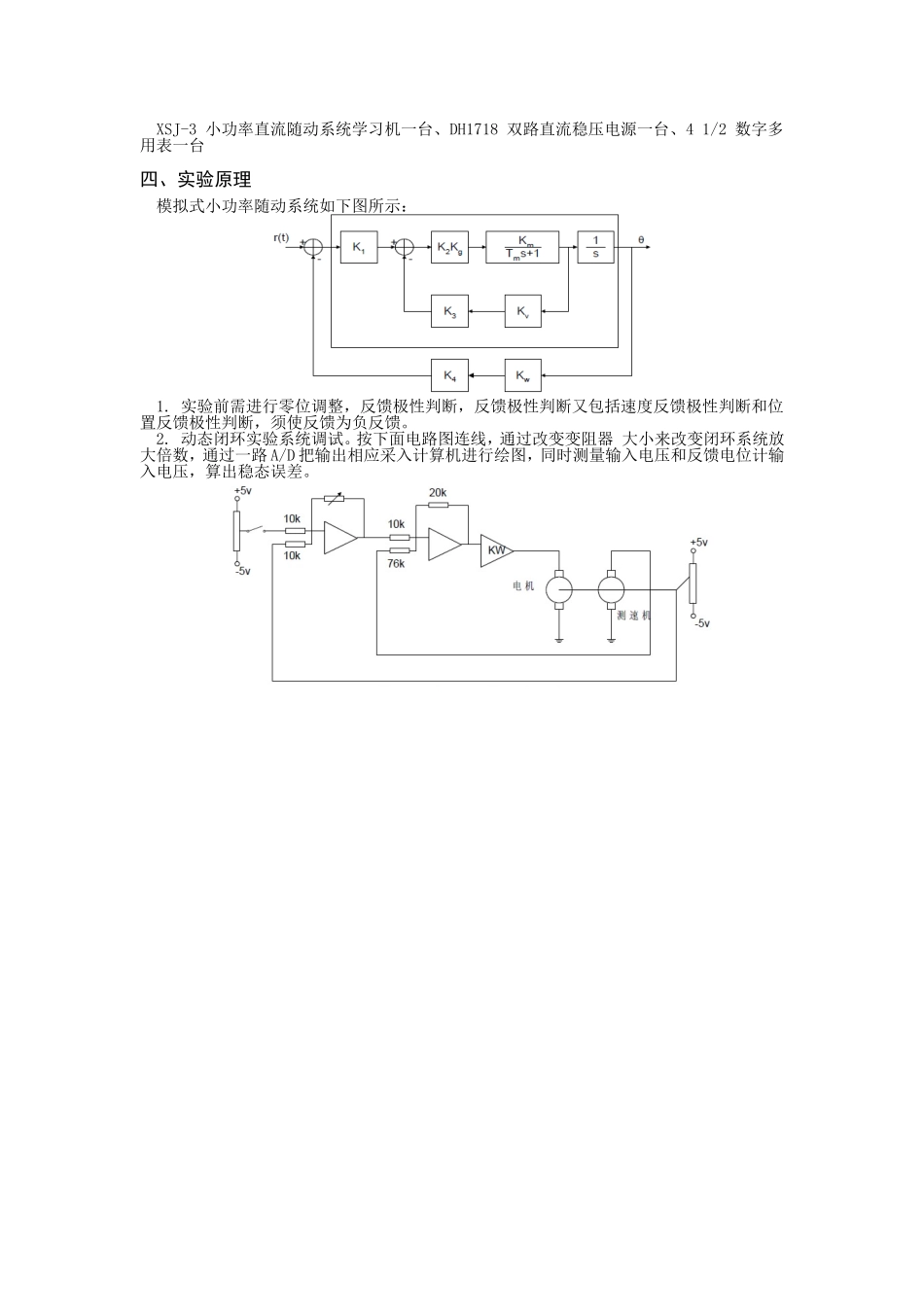
三、实验设备XSJ-3小功率直流随动系统学习机一台、DH1718双路直流稳压电源一台、41/2数字多用表一台四、实验原理模拟式小功率随动系统如下图所示:1
实验前需进行零位调整,反馈极性判断,反馈极性判断又包括速度反馈极性判断和位置反馈极性判断,须使反馈为负反馈
动态闭环实验系统调试
按下面电路图连线,通过改变变阻器大小来改变闭环系统放大倍数,通过一路A/D把输出相应采入计算机进行绘图,同时测量输入电压和反馈电位计输入电压,算出稳态误差
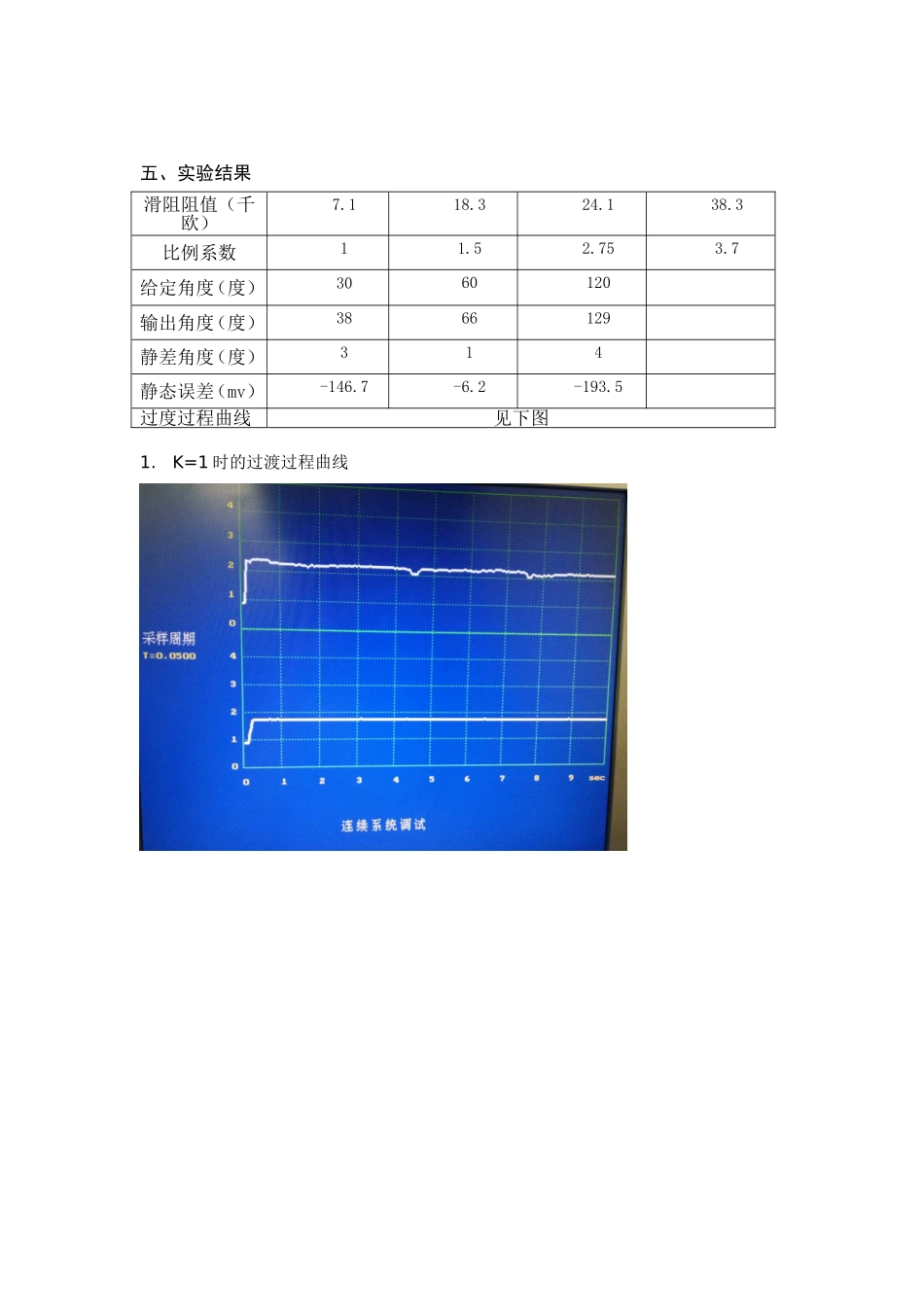
五、实验结果滑阻阻值(千欧)7
3比例系数11
7给定角度(度)3060120输出角度(度)3866129静差角度(度)314静态误差(mv)-146
5过度过程曲线见下图1
K=1时的过渡过程曲线2
5时的过渡过程曲线3
75时的过渡过程曲线4
7时的过渡过程曲线六、思考题及实验感想1如果速度反馈极性不对应如何处理
如果位置反馈极性不对应如何处理
答:首先判断测速机反馈极性
在一级运放处加一电压,记住电机转向,然后断开输入,用手旋转电机按同一转向