2008年9月第34卷第9期北京航空航天大学学报JournalofBeijingUniversityofAeronauticsandAstronauticsSeptember2008Vol
34No19收稿日期:2007209228作者简介:高磊(1979-),男,河北石家庄人,博士生,squirelive@gmail
基于边缘对称性的视频车辆检测算法高磊李超朱成军熊璋(北京航空航天大学计算机学院,北京100191)摘要:针对现有视频车辆检测算法受光照、阴影等环境因素影响大,漏检和误检率高的问题,提出了一种视频车辆检测算法
有别于传统算法使用运动特征进行车辆检测,该算法使用边缘特征和对性特征定位车辆
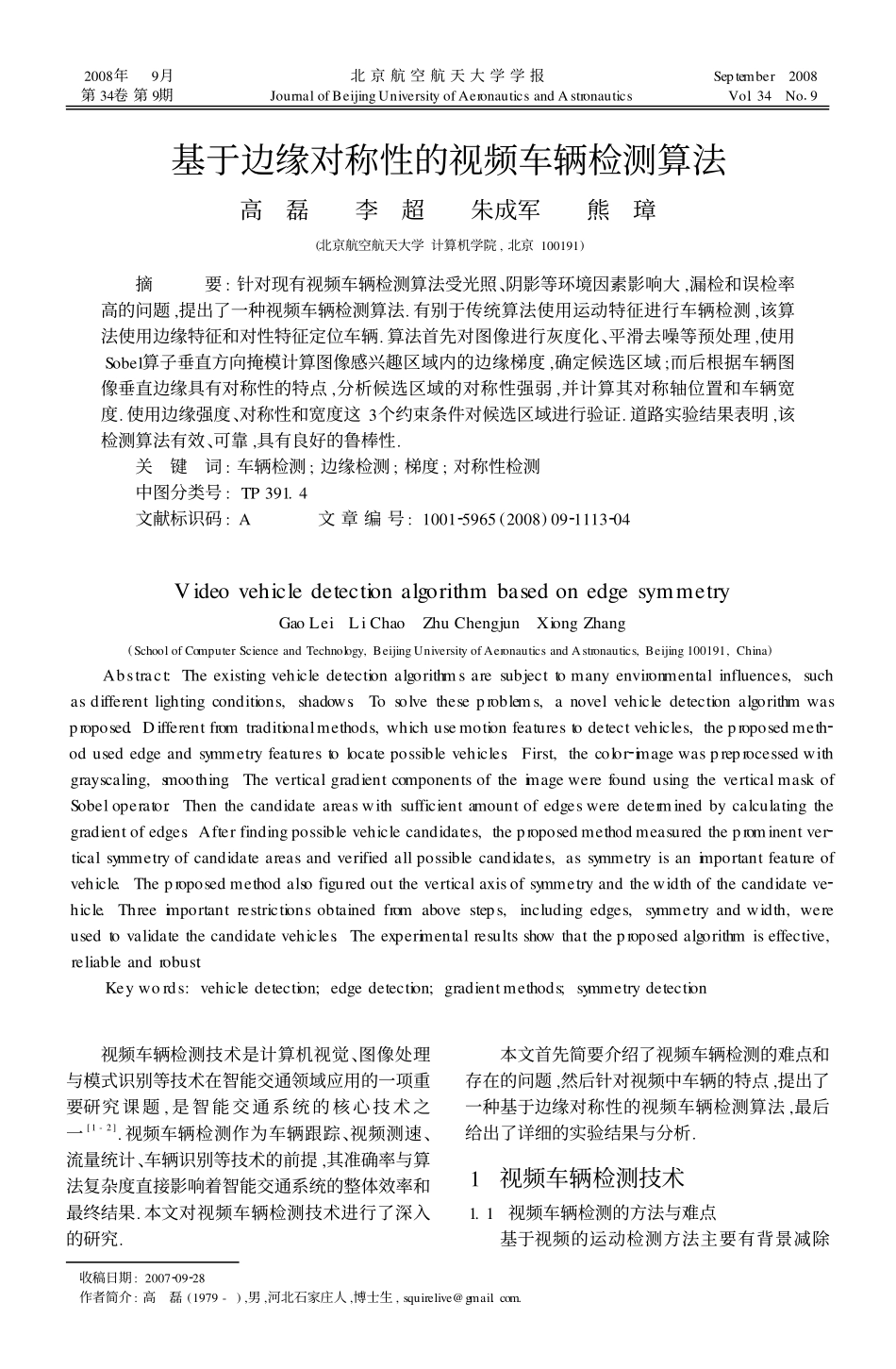
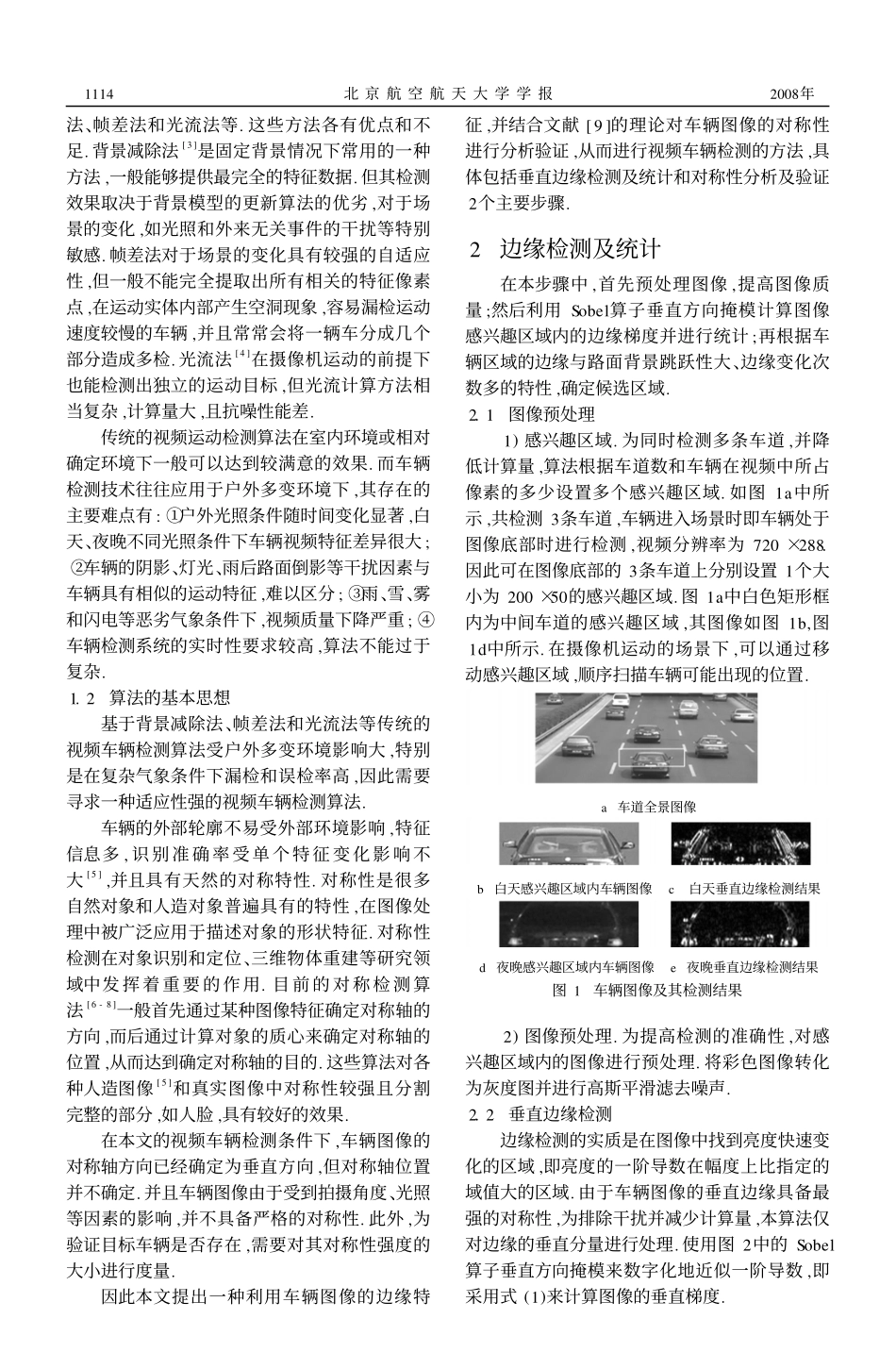
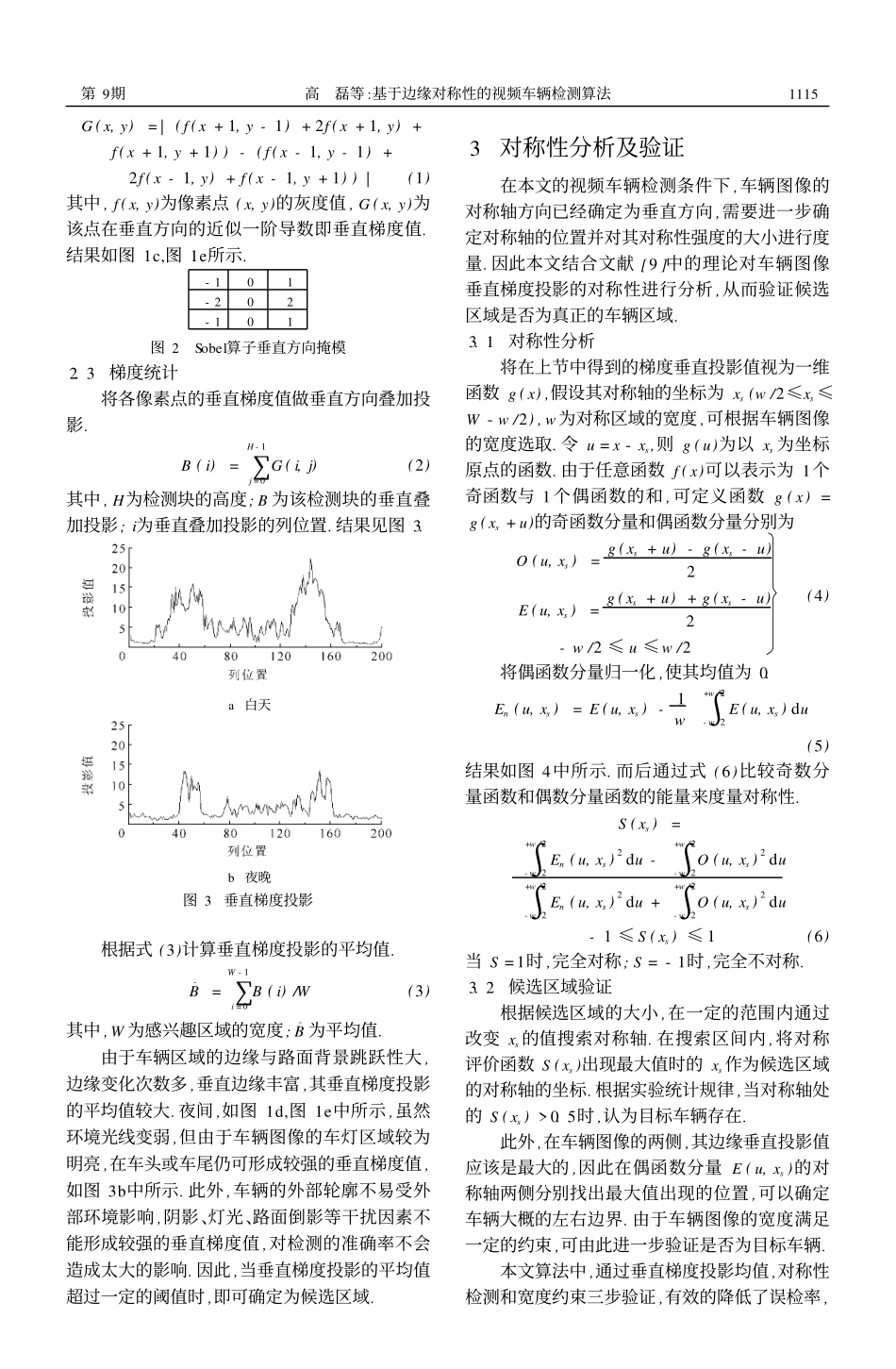
算法首先对图像进行灰度化、平滑去噪等预处理,使用Sobel算子垂直方向掩模计算图像感兴趣区域内的边缘梯度,确定候选区域;而后根据车辆图像垂直边缘具有对称性的特点,分析候选区域的对称性强弱,并计算其对称轴位置和车辆宽度
使用边缘强度、对称性和宽度这3个约束条件对候选区域进行验证
道路实验结果表明,该检测算法有效、可靠,具有良好的鲁棒性
关键词:车辆检测;边缘检测;梯度;对称性检测中图分类号:TP391
4文献标识码:A文章编号:100125965(2008)0921113204VideovehicledetectionalgorithmbasedonedgesymmetryGaoLeiLiChaoZhuChengjunXiongZhang(SchoolofComputerScienceandTechnology,BeijingUniversityofAeronauticsandAstronautics,Beijing100191,China)Abstract:Theexistingvehicledetectionalgorithmsaresubjecttomanyenvi