实用文档标准文案Pix4UAV软件处理无人机数据操作流程一、Pix4UAV处理无人机数据包括以下几个步骤:1、数据整理2、启动软件3、新建工程4、数据处理5、成果数据查看6、数据后处理二、具体操作步骤如下:1数据整理1)影像数据和POS数据的文件名及其存放的路径都不要出现中文
原始数据的存储路径和成果数据的最好不在同一盘(若只有一个可以存放数据的盘,则两者最好不要在同一路径下,都放在根目录即可),否则有可能影响速度
2)POS的格式可为*
dat或者*
csv中的任意一种,内容中不能出现任何中文字符
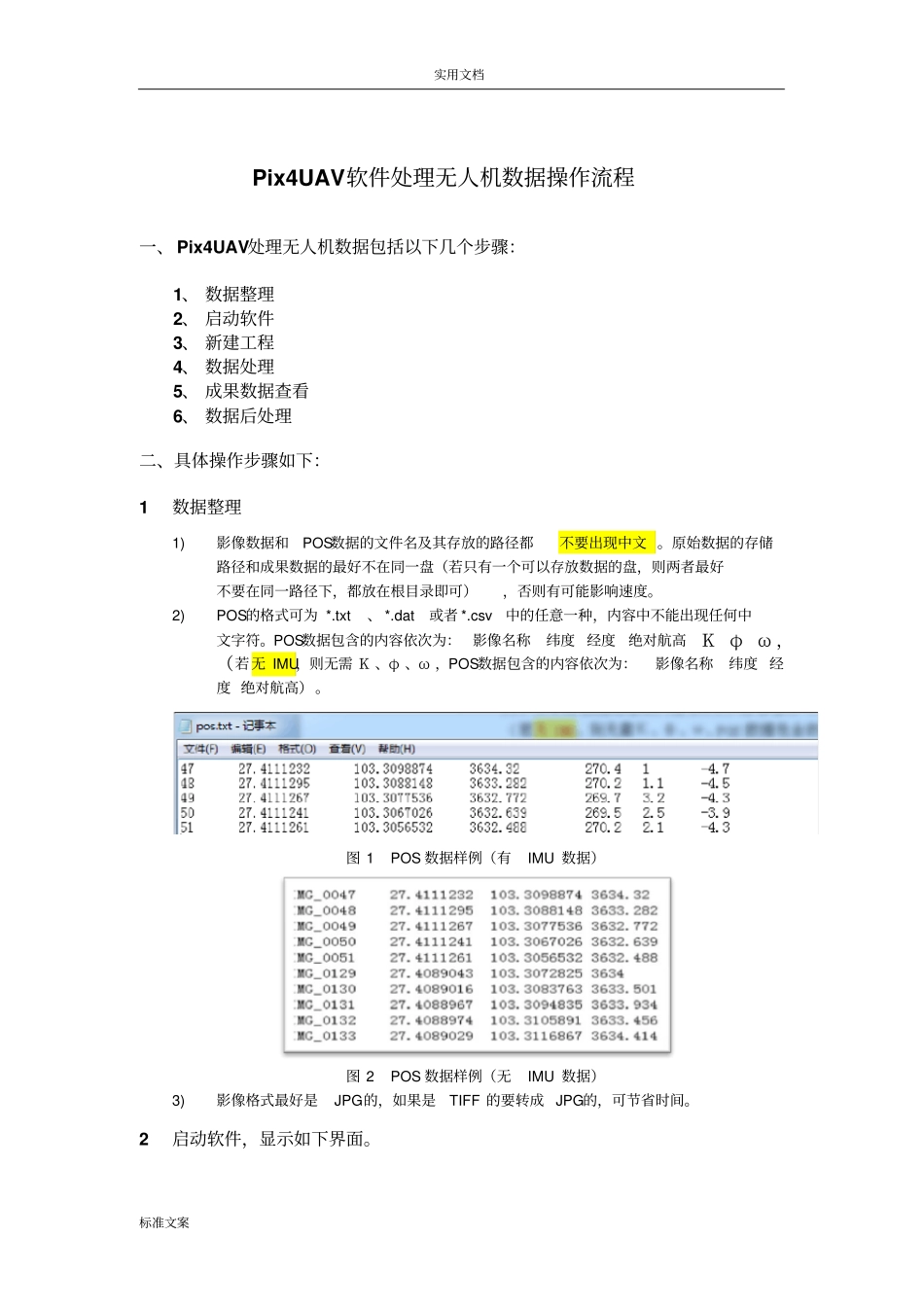
POS数据包含的内容依次为:影像名称纬度经度绝对航高Κφω,(若无IMU,则无需Κ、φ、ω,POS数据包含的内容依次为:影像名称纬度经度绝对航高)
图1POS数据样例(有IMU数据)图2POS数据样例(无IMU数据)3)影像格式最好是JPG的,如果是TIFF的要转成JPG的,可节省时间
2启动软件,显示如下界面
实用文档标准文案3新建工程1)点击Project菜单,从列表中选择NewProject
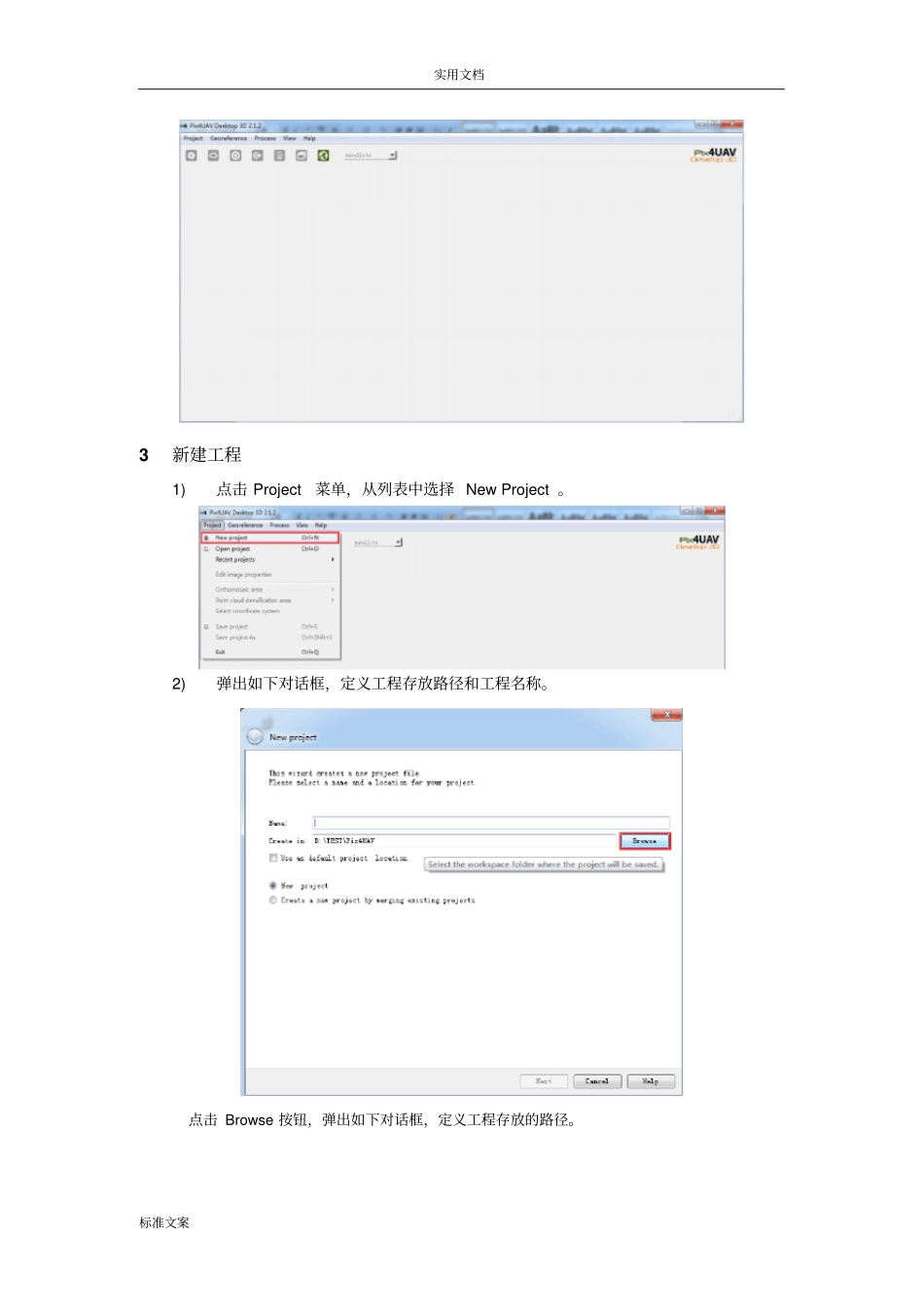
2)弹出如下对话框,定义工程存放路径和工程名称
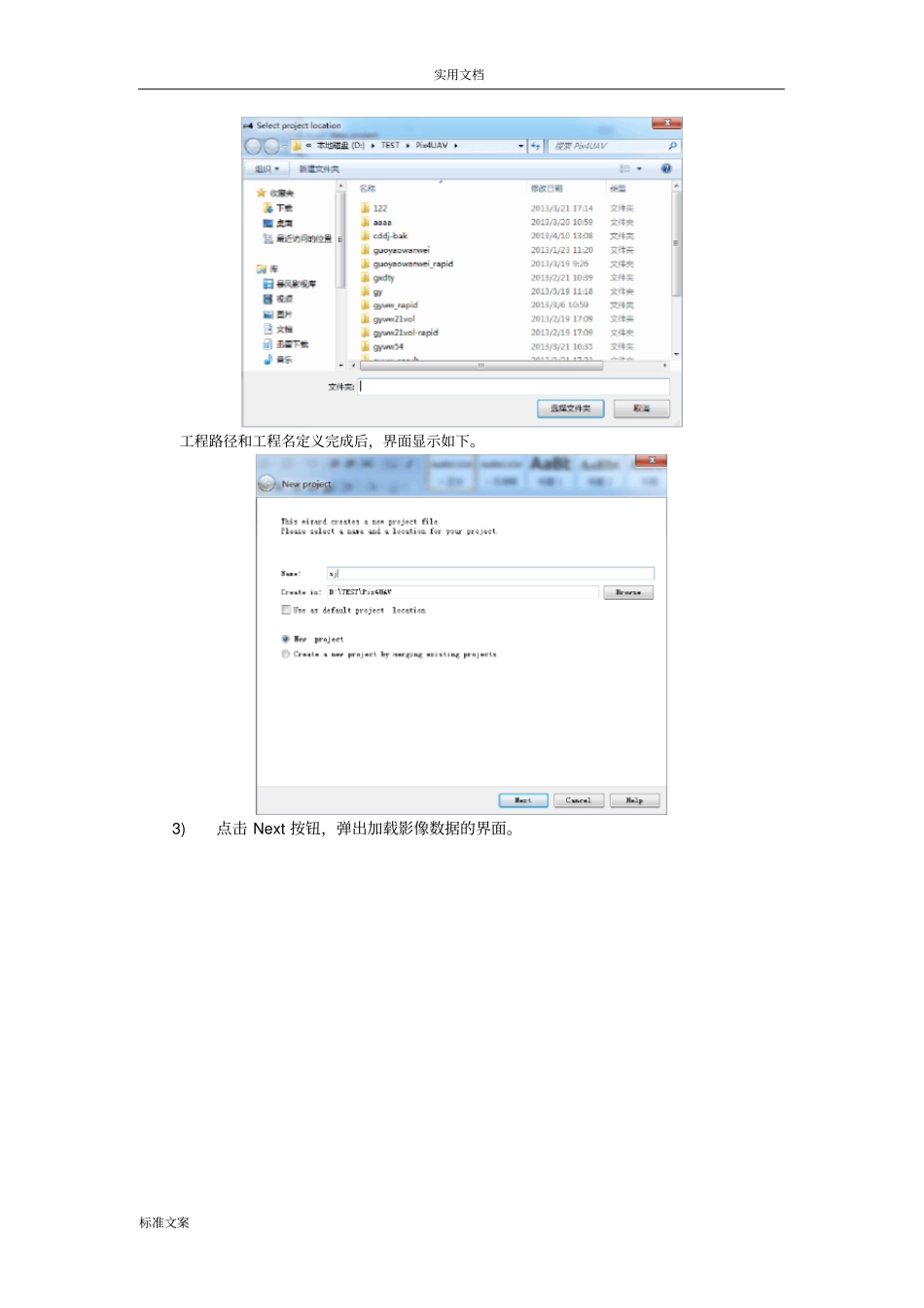
点击Browse按钮,弹出如下对话框,定义工程存放的路径
实用文档标准文案工程路径和工程名定义完成后,界面显示如下
3)点击Next按钮,弹出加载影像数据的界面
实用文档标准文案点击按钮,找到影像数据存放的路径并选中待处理的影像加载,加载数据完成后,显示界面如下
4)点击next按钮,显示如下界面
定义坐标系、相机参数,并导入POS数据
实用文档标准文案①坐标系设定
若默认的坐标系正确,则无需更改
若不正确,则点击Imagescoordinatesystem选项卡中的按钮,弹出如下的定义坐标系界面
可以通过点击来选择投影和坐标系;也可以通过导入通用的prj文件来定义坐标系
②相机模型设定
相机模型的核查、修改或自定义