UPS逆变控制系统设计(1)肖永利(2001-8-7)摘要:本文主要讨论了UPS逆变控制系统的设计方法和步骤
首先建立了逆变系统的数学模型,根据逆变自身动态特性,确立了引入电容电流反馈和电压反馈的控制结构
在此基础上,分析了系统参数对控制特性的影响
结合C6KNN机种的逆变控制系统设计过程,对设计中遇到的各种实际问题的产生原因和相应的控制参数调整思路做了分析和解释,其中包括系统延迟、瞬投RCD载电压上冲、限流以及卸载电压上冲等问题
本文最后对现有的遗留问题做了总结并确定了问题的解决方向
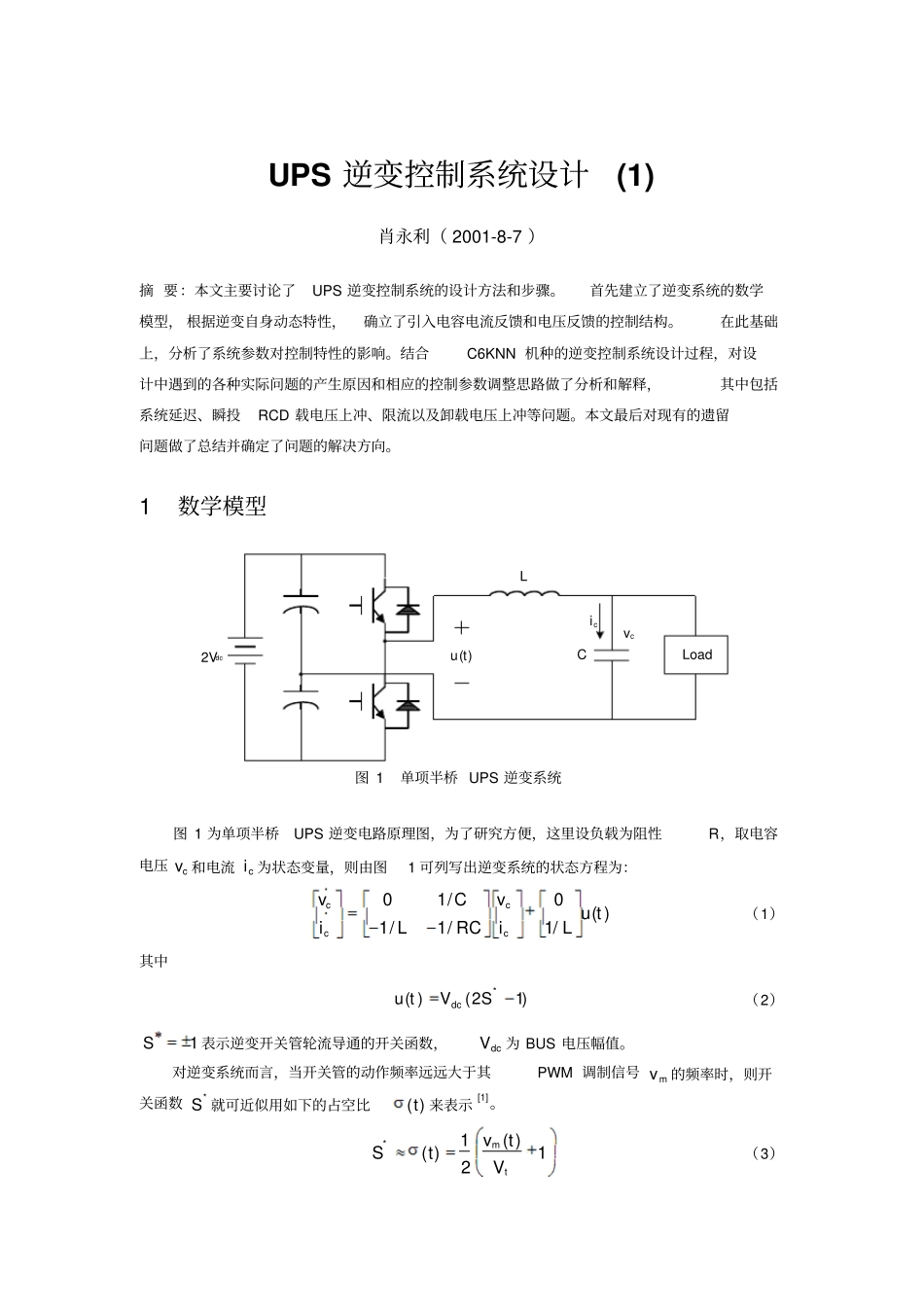
1数学模型LoadLC2Vdccvci)(tu图1单项半桥UPS逆变系统图1为单项半桥UPS逆变电路原理图,为了研究方便,这里设负载为阻性R,取电容电压cv和电流ci为状态变量,则由图1可列写出逆变系统的状态方程为:)(/10/1/1/10tuLivRCLCivcccc(1)其中)12()(*SVtudc(2)1S表示逆变开关管轮流导通的开关函数,dcV为BUS电压幅值
对逆变系统而言,当开关管的动作频率远远大于其PWM调制信号mv的频率时,则开关函数*S就可近似用如下的占空比)(t来表示[1]
1)(21)(*tmVtvtS(3)式中tV为载波的幅值
由式(2)和(3)可得:)()(tvKtumpwm(4)式中:tdcpwmVVK即为PWM放大系数
由式(1)和(4)可得调值信号mv到电容电压cv的传递函数)(0sG为:1)/()(20sRLLCsKsGpwm(5)上述逆变模型是在阻性负载情况下得到的,模型参数与负载R大小有关,因此逆变模型的参数具有不确定性
当R为无穷大,即为空载情况下时,逆变模型为:1)(20LCsKsGpwm(6)另外,实际UPS系统还可能携带除阻性外的容性或感性以及RCD非线性负载等,所以实际UPS系统的逆变模型还具有结构不确定性
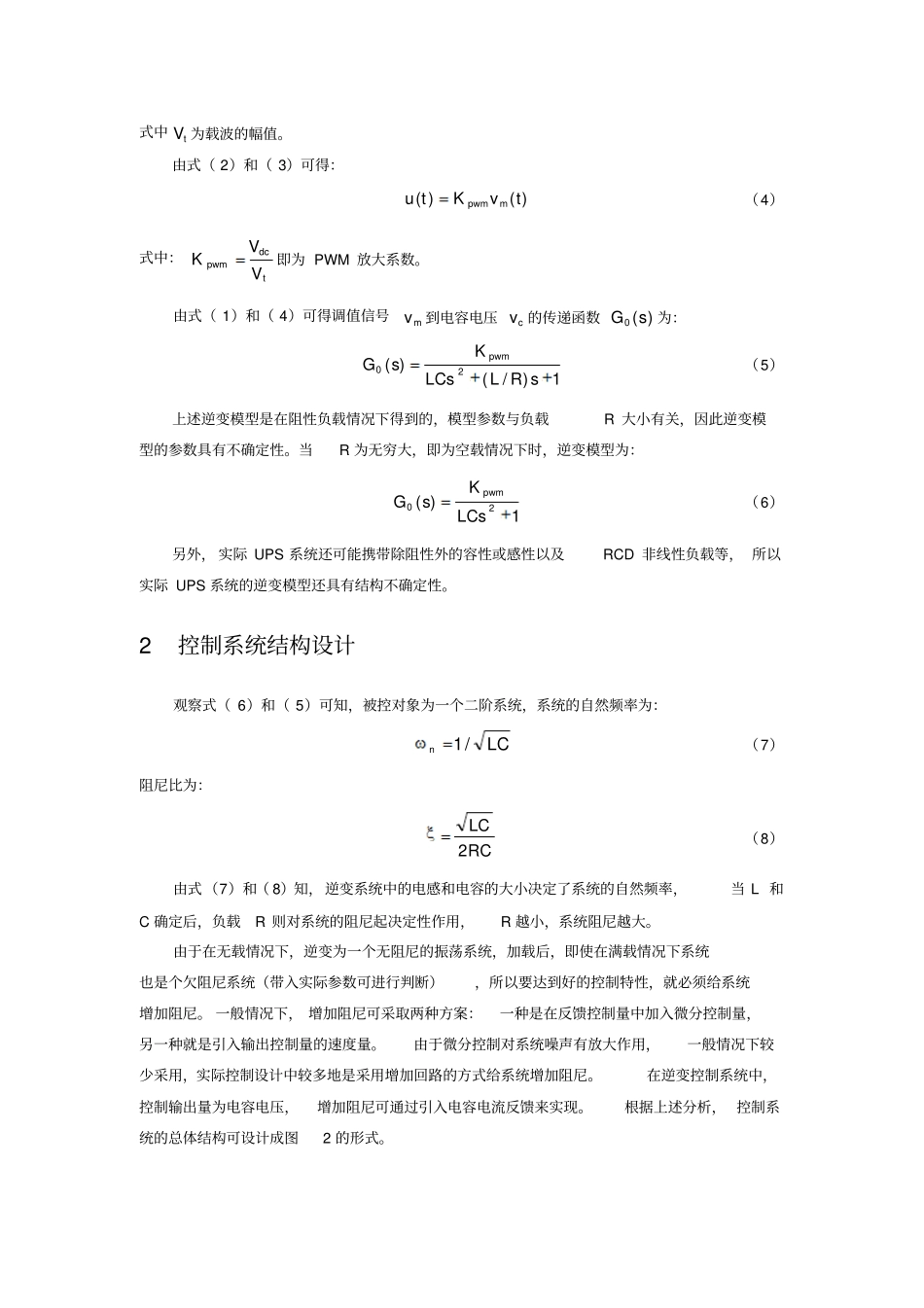
2控制系统结构设计观察式(6)和(