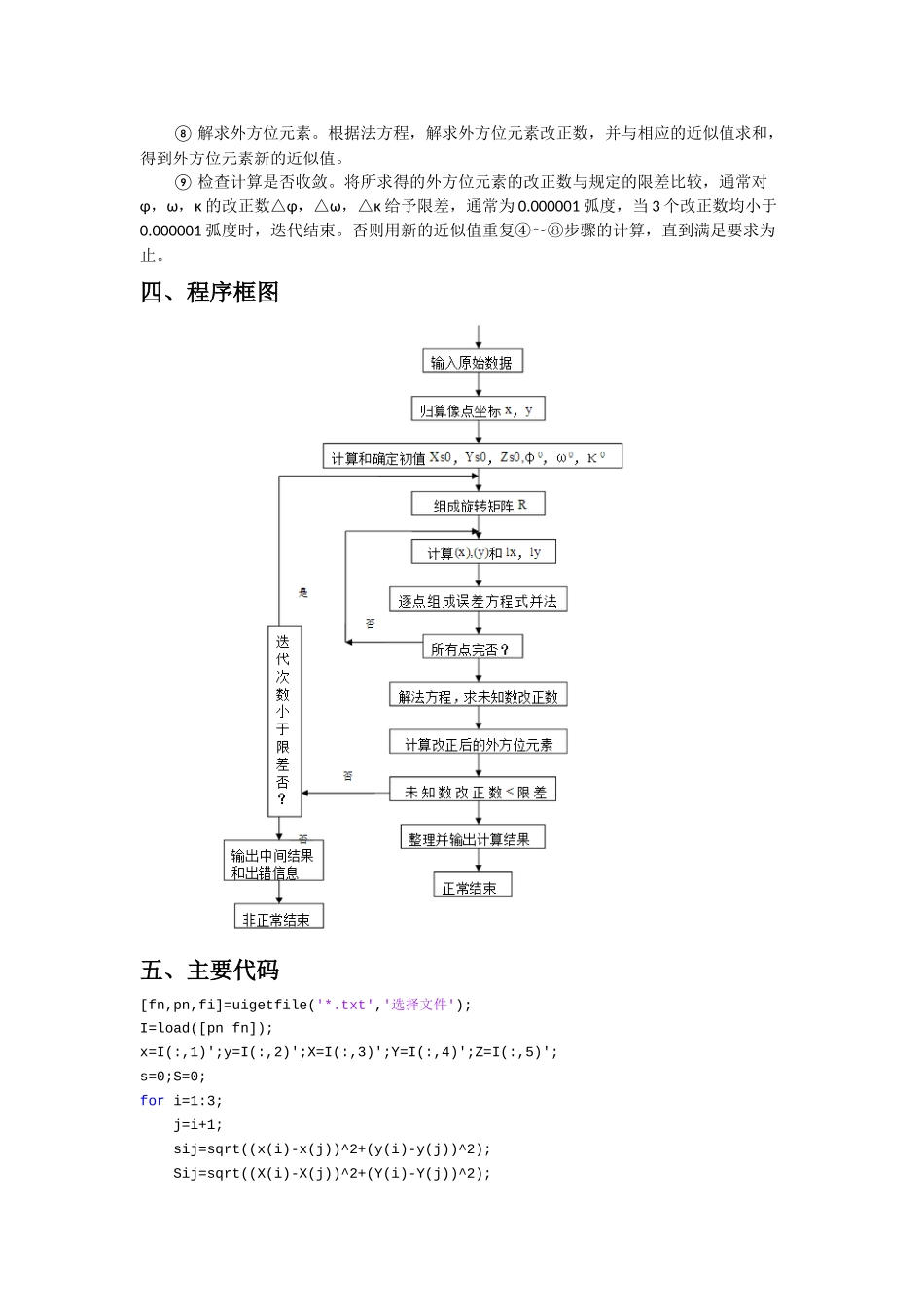
《摄影测量学》单像空间后方交会实习报告班级:XXXX00000姓名:XXX000学号:XXXXXXXXXXXXX指导教师:XXX一、实习目的1、掌握空间后方交会的定义和实现算法;2、了解摄影测量平差的基本过程;3、熟练MATLAB等程序编写。二、实习原理利用至少三个已知地面控制点的坐标、、,与其影像上对应的三个像点的影像坐标、、,根据共线方程,反求该像片的外方位元素。共线条件方程式:将共线式线性化并取一次小值项得:三、解算过程①获取已知数据。包括影像比例尺1/m,平均摄影距离(航空摄影的航高)H,内方位元素x0、y0、f,控制点的空间坐标X、Y、Z。②量测控制点的像点坐标并进行必要的影像坐标系统误差改正,得到像点坐标。③确定未知数的初始值。单像空间后方交会必须给出待定参数的初始值,在竖直航空摄影且地面控制点大体对称分布的情况下,Xs0和Ys0为均值,Zs0为航高,φ、ω、κ的初值都设为0。或者κ的初值可在航迹图上找出或根据控制点坐标通过坐标正反变换求出。④计算旋转矩阵R。利用角元素近似值计算方向余弦值,组成R阵。⑤逐点计算像点坐标的近似值。利用未知数的近似值按共线条件式计算控制点像点坐标的近似值(x),(y)。⑥逐点计算误差方程式的系数和常数项,组成误差方程式。⑦计算法方程的系数矩阵ATA与常数项ATL,组成法方程式。⑧解求外方位元素。根据法方程,解求外方位元素改正数,并与相应的近似值求和,得到外方位元素新的近似值。⑨检查计算是否收敛。将所求得的外方位元素的改正数与规定的限差比较,通常对φ,ω,κ的改正数△φ,△ω,△κ给予限差,通常为0.000001弧度,当3个改正数均小于0.000001弧度时,迭代结束。否则用新的近似值重复④~⑧步骤的计算,直到满足要求为止。四、程序框图五、主要代码[fn,pn,fi]=uigetfile('*.txt','选择文件');I=load([pnfn]);x=I(:,1)';y=I(:,2)';X=I(:,3)';Y=I(:,4)';Z=I(:,5)';s=0;S=0;fori=1:3;j=i+1;sij=sqrt((x(i)-x(j))^2+(y(i)-y(j))^2);Sij=sqrt((X(i)-X(j))^2+(Y(i)-Y(j))^2);s=s+sij;S=S+Sij;endm=S*1000/s;f=153.24;Xs0=(X(1)+X(2)+X(3)+X(4))/4;Ys0=(Y(1)+Y(2)+Y(3)+Y(4))/4;Zs0=m*f;fai0=0;omig0=0;ka0=0;forv=1:+inf;a1=cos(fai0)*cos(ka0)-sin(fai0)*sin(omig0)*sin(ka0);a2=-cos(fai0)*sin(ka0)-sin(fai0)*sin(omig0)*cos(ka0);a3=-sin(fai0)*cos(omig0);b1=cos(omig0)*sin(ka0);b2=cos(omig0)*cos(ka0);b3=-sin(omig0);c1=sin(fai0)*cos(ka0)+cos(fai0)*sin(omig0)*sin(ka0);c2=-sin(fai0)*sin(ka0)+cos(fai0)*sin(omig0)*cos(ka0);c3=cos(fai0)*cos(omig0);R=[a1a2a3;b1b2b3;c1c2c3];l=[];A=[];forh=1:4;O=a1*(X(h)-Xs0)+b1*(Y(h)-Ys0)+c1*(Z(h)-Zs0);P=a2*(X(h)-Xs0)+b2*(Y(h)-Ys0)+c2*(Z(h)-Zs0);Q=a3*(X(h)-Xs0)+b3*(Y(h)-Ys0)+c3*(Z(h)-Zs0);x1=-f*O/Q;y1=-f*P/Q;a11=(a1*f+a3*x(h))/Q;a12=(b1*f+b3*x(h))/Q;a13=(c1*f+c3*x(h))/Q;a14=y(h)*sin(omig0)-(x(h)/f*(x(h)*cos(ka0)-y(h)*sin(ka0))+f*cos(ka0))*cos(omig0);a15=-f*sin(ka0)-x(h)/f*(x(h)*sin(ka0)+y(h)*cos(ka0));a16=y(h);a21=(a2*f+a3*y(h))/Q;a22=(b2*f+b3*y(h))/Q;a23=(c2*f+c3*y(h))/Q;a24=-x(h)*sin(omig0)-(y(h)/f*(x(h)*cos(ka0)-y(h)*sin(ka0))-f*sin(ka0))*cos(omig0);a25=-f*cos(ka0)-y(h)/f*(x(h)*sin(ka0)+y(h)*cos(ka0));a26=-x(h);lx=x(h)-x1;ly=y(h)-y1;lh=[lxly]';Ah=[a11,a12,a13,a14,a15,a16;a21,a22,a23,a24,a25,a26];A=[A;Ah];l=[l;lh];endXX=inv(A'*A)*A'*l;Xs0=Xs0+XX(1);Ys0=Ys0+XX(2);Zs0=Zs0+XX(3);fai0=fai0+XX(4);omig0=omig0+XX(5);ka0=ka0+XX(6);R=[a1,a2,a3;b1,b2,b3;c1,c2,c3]Xs=Xs0Ys=Ys0Zs=Zs0fai=fai0omig=omig0ka=ka0Ifabs(XX(4))<0.0000291&&abs(XX(5))<0.0000291&&abs(XX(6))<0.0000291breakendEndR=[a1,a2,a3;b1,b2,b3;c1,c2,c3];V=A*XX-l;Qii=inv(A'*A);m0=sqrt(V'*V/2);mi=m0*sqrt(Qii);m=diag(mi);m=[m(1),m(2),m(3),m(4)/pi*180*3600,m(5)/pi*180*3600,m(6)/pi*180*3600];mXs=m(1);mYs=m(2);mZs=m(3);mfai=m(4);momig=m(5);mka=m(6);fp=fopen('后方交会计算结果.txt','wt');fprintf(fp,'迭代次数:%d\n',v);fprintf(fp,'\n旋转矩阵R:\n');[m,n]=size(R);fori=1:1:mforj=1:1:nifj==nfprintf(fp,'%g\n',R(i,j));elsefprintf(fp,'%g\t',R(i,j));endendendfprintf(fp,'\n外方位元素解:\n');fprintf(fp,'Xs=%g\t',Xs);fprintf(fp,'Ys=%g\t',Ys);fprintf(fp,'Zs=%g\n',Zs);fprintf(fp,'φ=%g\t',fai);fprintf(fp,'ω=%g\t',omig);fprintf(fp,'κ=%g\n',ka);fprintf(fp,'\n单位权中误差的值:mo=%g\n',m0);fprintf(fp,'\n外方位元素中误差为:\n');fprintf(fp,'mXs=%g米\t',mXs);fprintf(fp,'mYs=%g米\t',mYs);fprintf(fp,'mZs=%g米\n',mZs);fprintf(fp,'mφ=%g秒\t',mfai);fprintf(fp,'mω=%g秒\t',momig);fprintf(fp,'mκ=%g秒\n',mka);六、实习结果1、起算数据2、运行结果3、几次迭代的数据