七年级信息技术下册《第6课胆小鬼机器人》学案【学习目标】1
了解红外避障传感器的工作原理、构成
了解在RC软件中“红外避障传感器”模块的使用
掌握胆小鬼机器人的编程思路
掌握在RC软件中胆小鬼机器人的编程方法
【学习过程】【引言】小明已经会指挥他的机器人按各种各样的路线行走,因为实验室空间狭小,机器人有时总免不了会和周围的物品发生碰撞,尤其是当来不及阻止、眼睁睁地看着机器人撞了个底朝天的时候,小明就特别心痛
能不能让机器人学会保护自己,遇到障碍物时赶紧避开呐
他决心好好研究这问题,最后他终于制作成功一个胆小鬼机器人
一、自学——认识红外避障传感器计时:5分钟难度系数:★(一)独立学习(仔细阅读、独立完成)1
(计分:1分)仔细阅读教材P30-32的内容,接下来完成下面的题目
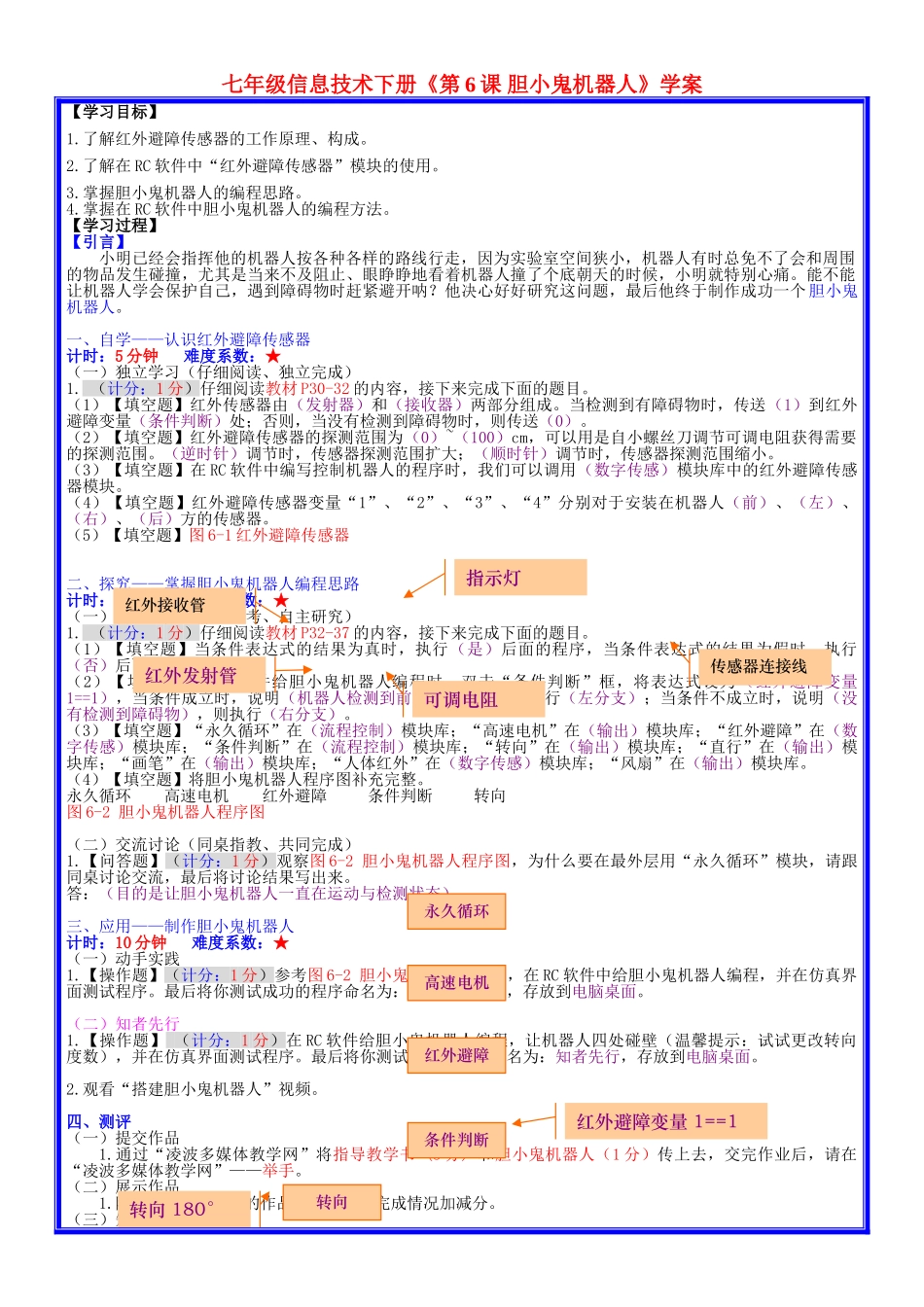
(1)【填空题】红外传感器由(发射器)和(接收器)两部分组成
当检测到有障碍物时,传送(1)到红外避障变量(条件判断)处;否则,当没有检测到障碍物时,则传送(0)
(2)【填空题】红外避障传感器的探测范围为(0)~(100)cm,可以用是自小螺丝刀调节可调电阻获得需要的探测范围
(逆时针)调节时,传感器探测范围扩大;(顺时针)调节时,传感器探测范围缩小
(3)【填空题】在RC软件中编写控制机器人的程序时,我们可以调用(数字传感)模块库中的红外避障传感器模块
(4)【填空题】红外避障传感器变量“1”、“2”、“3”、“4”分别对于安装在机器人(前)、(左)、(右)、(后)方的传感器
(5)【填空题】图6-1红外避障传感器二、探究——掌握胆小鬼机器人编程思路计时:10分钟难度系数:★(一)自主探究(静心思考、自主研究)1
(计分:1分)仔细阅读教材P32-37的内容,接下来完成下面的题目
(1)【填空题】当条件表达式的结果为真时,执行(是)后面的程序,当条件表达式的结果为假时,执行(否)后面的程