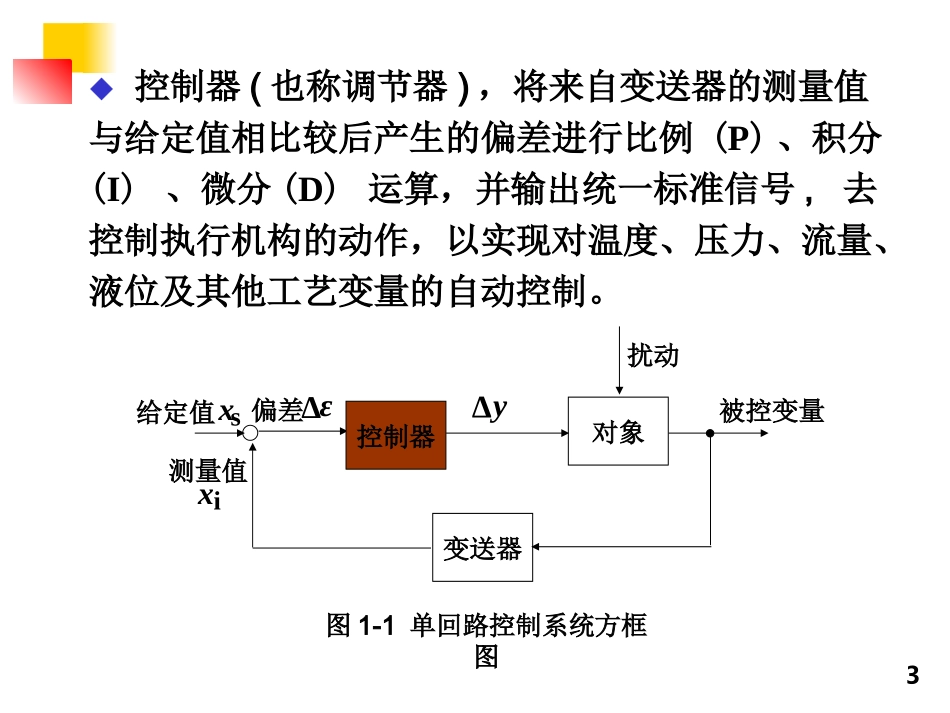
1第一章模拟式控制器第一节控制器的运算规律和构成方式第二节基型控制器第三节特种控制器和附加单元2控制器运算规律P、I、D、PI、PD、PID基型控制器各个电路框图和原理图分析特种控制器电路原理图分析附加单元电路原理图分析本章重点内容介绍积分反馈型积分限幅控制器PI-P切换控制器偏差报警单元输出限幅单元(务必读懂电路原理图)3控制器(也称调节器),将来自变送器的测量值与给定值相比较后产生的偏差进行比例(P)、积分(I)、微分(D)运算,并输出统一标准信号,去控制执行机构的动作,以实现对温度、压力、流量、液位及其他工艺变量的自动控制
图1-1单回路控制系统方框图控制器对象变送器给定值偏差测量值被控变量扰动xs∆εxi∆y4一、基本定义正反作用、KP、δ、TI、TD、KI、KD二、基本知识1
P、I、D、PI、PD等调节器阶跃响应特性曲线的绘制(会在坐标上画阶跃作用下的响应曲线)2
δ、TI、TD的测试方法(根据定义,实验方法)本节重点内容介绍第一节控制器的运算规律和组成方式5图1-1单回路控制系统方框图控制器对象变送器给定值偏差测量值被控变量扰动xs∆εxiy输入信号:测量信号和给定信号比较的偏差信号,用ε表示
ε=xi-xs输出信号:在偏差信号的作用下,输出的变化量,用y表示
第一节控制器的运算规律和组成方式一、概述6第一节控制器的运算规律和组成方式控制器的运算规律是指控制器的输出信号和输入偏差之间随时间变化的规律
∆y∆ε一、概述∆ε=ε∆ε对输入偏差而言,由于其初值为零,因此基本运算规律有比例(P)、积分(I)和微分(D)三种,各种控制器的运算规律均由这些基本运算规律组合而成
∆y∆y习惯上称ε>0为正偏差;ε0时>0称控制器为正作用控制器;ε0称控制器为反作用控制器
7二、PID控制器的运算规律(一)PID运算规律的表示形式PD0I1d