五种液压同步控制方案及精度
q&F2c(X&K在多支路驱动器同时动作的应用设计中,等速同步驱动出现问题较为突出
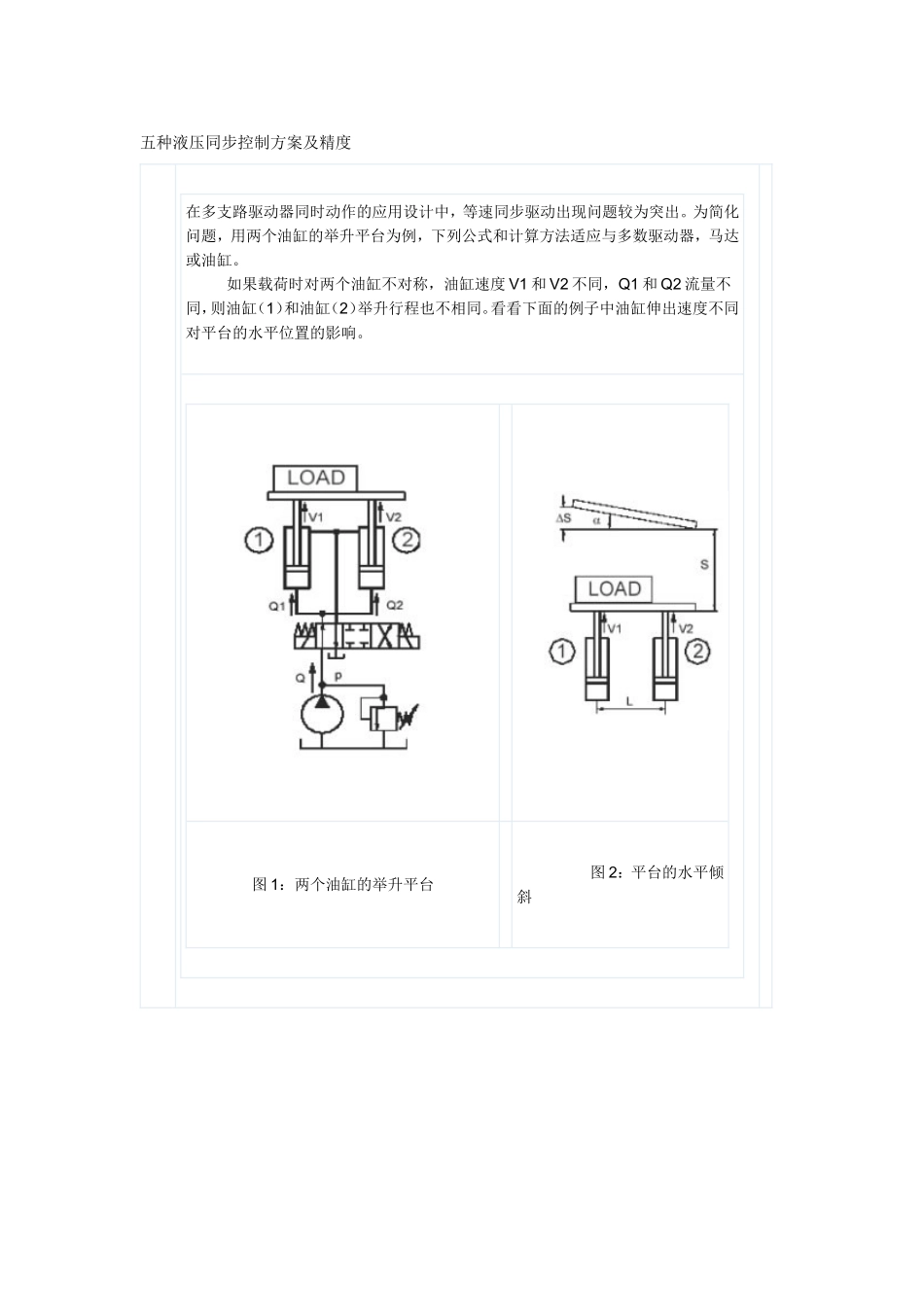
为简化问题,用两个油缸的举升平台为例,下列公式和计算方法适应与多数驱动器,马达或油缸
如果载荷时对两个油缸不对称,油缸速度V1和V2不同,Q1和Q2流量不同,则油缸(1)和油缸(2)举升行程也不相同
看看下面的例子中油缸伸出速度不同对平台的水平位置的影响
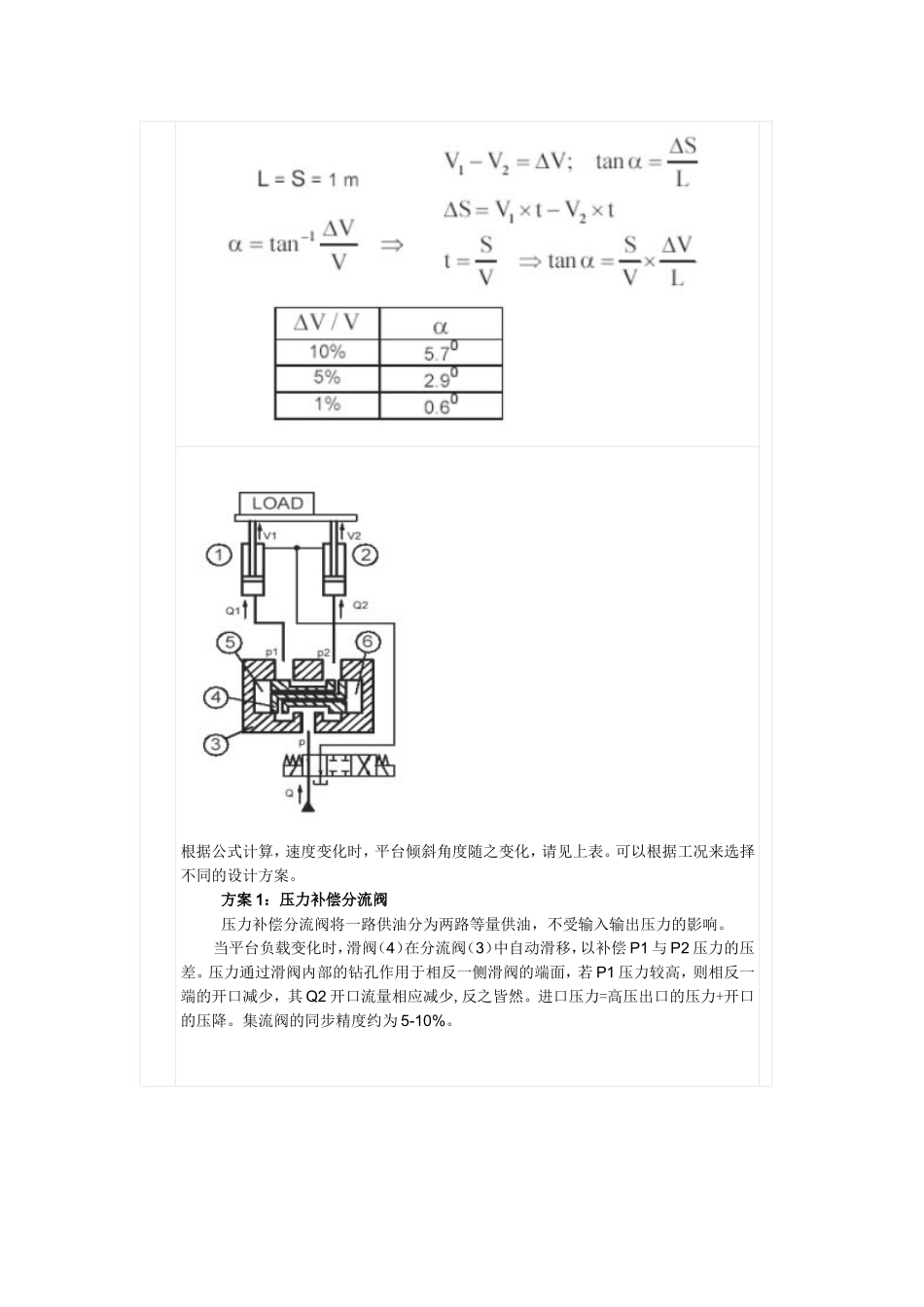
图1:两个油缸的举升平台图2:平台的水平倾斜根据公式计算,速度变化时,平台倾斜角度随之变化,请见上表
可以根据工况来选择不同的设计方案
K#I$l;U$m
O"n%X4Y方案1:压力补偿分流阀压力补偿分流阀将一路供油分为两路等量供油,不受输入输出压力的影响
当平台负载变化时,滑阀(4)在分流阀(3)中自动滑移,以补偿P1与P2压力的压差
压力通过滑阀内部的钻孔作用于相反一侧滑阀的端面,若P1压力较高,则相反一端的开口减少,其Q2开口流量相应减少,反之皆然
进口压力=高压出口的压力+开口的压降
集流阀的同步精度约为5-10%
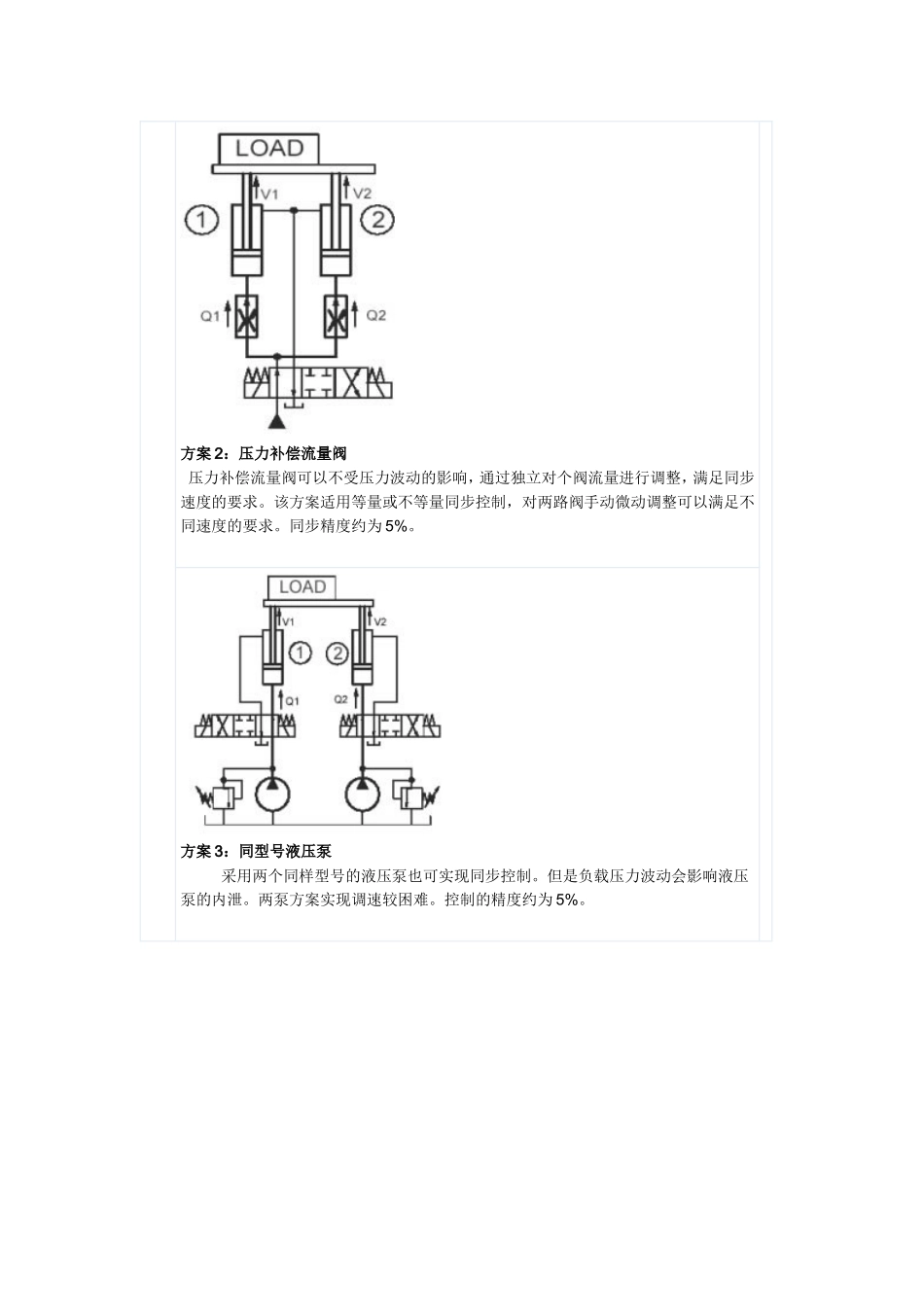
*a(Q%M;l#Q0V$u1c"\"M$Y)y1I0R8u*p%Z0^-Y;r*F方案2:压力补偿流量阀压力补偿流量阀可以不受压力波动的影响,通过独立对个阀流量进行调整,满足同步速度的要求
该方案适用等量或不等量同步控制,对两路阀手动微动调整可以满足不同速度的要求
同步精度约为5%
l9Q1e0D
a%~(Z方案3:同型号液压泵采用两个同样型号的液压泵也可实现同步控制
但是负载压力波动会影响液压泵的内泄
两泵方案实现调速较困难
控制的精度约为5%
2G*\%l9f%{2w;y方案4:双杆等速油缸串联回路)b;w*i$AU#}9k/j2W采用双杆等速油缸串联回路的主要优点是容积效率较高
由于油缸1排出的流量与进入油缸2的流量相等,所以两油缸的速度相等
该方案等速同步控制精度约为