第1页机器人避障问题的最短路径分析摘要本论文研究了机器人避障最短路径和最短时间路径的问题
主要讨论了在一个区域中存在12个障碍物,由出发点到达目标点以及由出发点经过若干目标点最终到达出发点的两种情况
采用传统的避障方法——切线图法
建立了线圆结构,这样任何路径,我们都可以将路径划分为若干个这种线圆结构来求解
对于途中经过节点再到达目标点的状况,我们采用在转弯点和节点都采用最小转弯半径,以节点为切点的形式
然后建立了最优化模型,利用MATLAB软件对方案进行求解
问题一:把路径分解成若干个线圆结构来求解,然后把可能的最短路径采用穷举法列举出来,最终得出最短路径:AO最短路径为:471
0BO最短路径为:869
5CO最短路径为:1093
3对于OCBAO我们将A、B、C看作切点,同样采用线圆结构计算
OCBAO最短路径为:2827
1问题二:考虑避障路径和转弯速度,我们建立时间与路径之间的模型,用MATLAB软件求出最优解
当转弯半径为11
5的时候,可以得出最短时间为:T=94
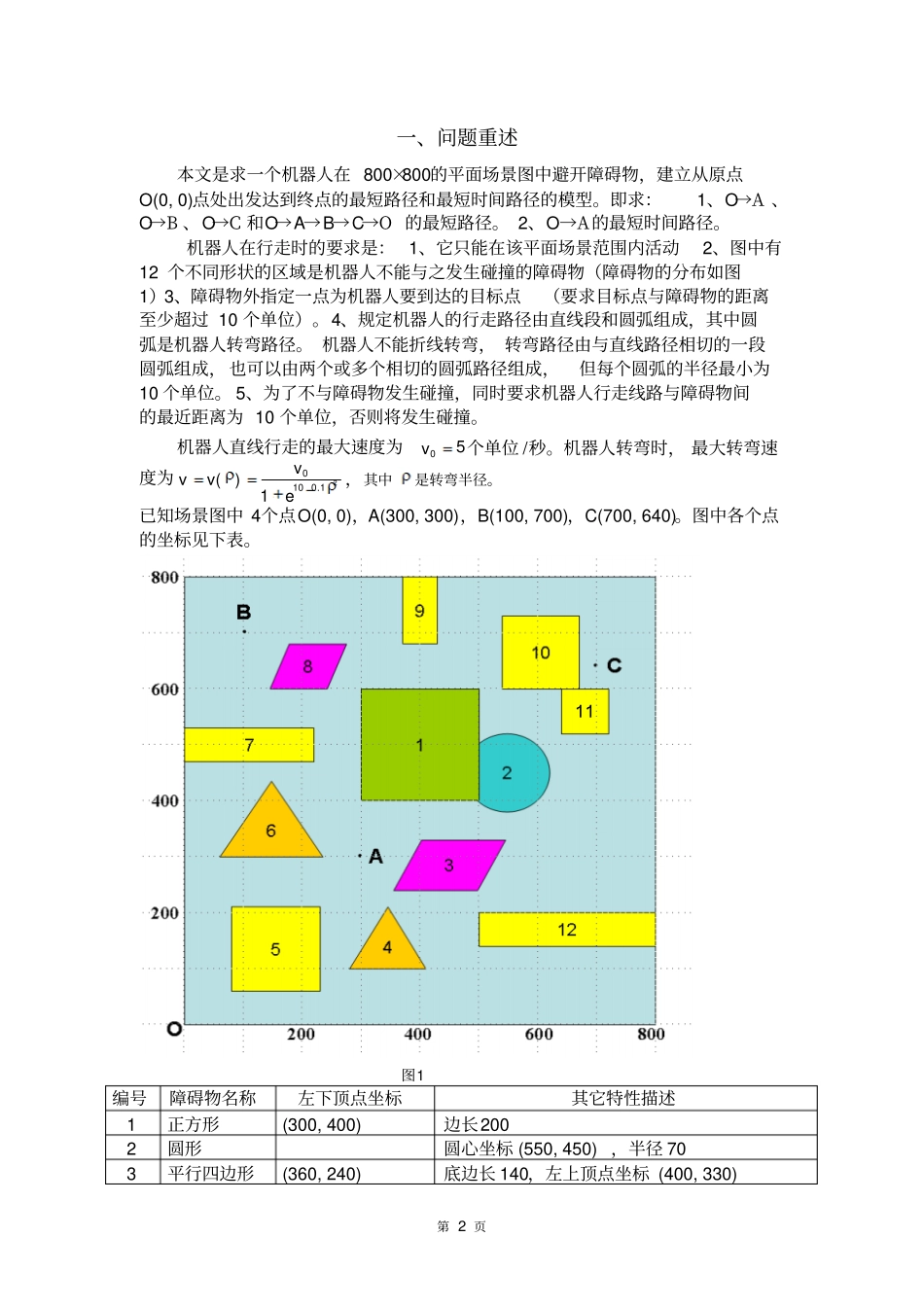
3关键词最优化模型避障路径线圆结构切线图法第2页一、问题重述本文是求一个机器人在800×800的平面场景图中避开障碍物,建立从原点O(0,0)点处出发达到终点的最短路径和最短时间路径的模型
即求:1、O→A、O→B、O→C和O→A→B→C→O的最短路径
2、O→A的最短时间路径
机器人在行走时的要求是:1、它只能在该平面场景范围内活动2、图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物(障碍物的分布如图1)3、障碍物外指定一点为机器人要到达的目标点(要求目标点与障碍物的距离至少超过10个单位)
4、规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单