实用标准文档文案大全实验三:最小拍控制系统一、实验目的1.建立计算机最小拍控制系统的一般概念;2.掌握有纹波最小拍控制器的设计方法3.观察无纹波最小拍控制器的设计方法;4.了解最小拍控制器的优缺点;5.掌握最小拍控制系统的改进方法
二、实验仪器1
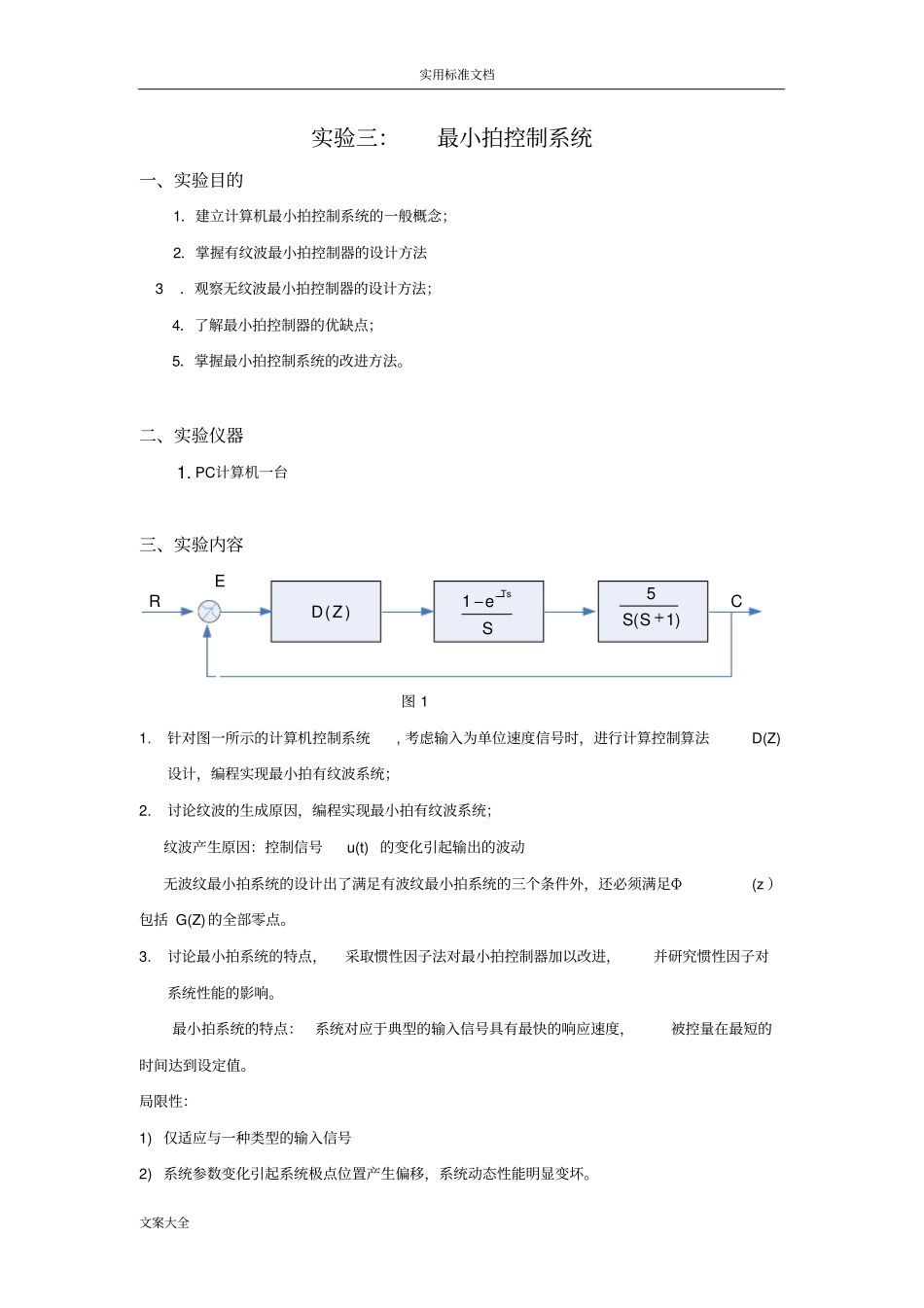
PC计算机一台三、实验内容()DZ1TseS5(1)SSREC图11
针对图一所示的计算机控制系统,考虑输入为单位速度信号时,进行计算控制算法D(Z)设计,编程实现最小拍有纹波系统;2
讨论纹波的生成原因,编程实现最小拍有纹波系统;纹波产生原因:控制信号u(t)的变化引起输出的波动无波纹最小拍系统的设计出了满足有波纹最小拍系统的三个条件外,还必须满足Φ(z)包括G(Z)的全部零点
讨论最小拍系统的特点,采取惯性因子法对最小拍控制器加以改进,并研究惯性因子对系统性能的影响
最小拍系统的特点:系统对应于典型的输入信号具有最快的响应速度,被控量在最短的时间达到设定值
局限性:1)仅适应与一种类型的输入信号2)系统参数变化引起系统极点位置产生偏移,系统动态性能明显变坏
实用标准文档文案大全3)采样周期的限制
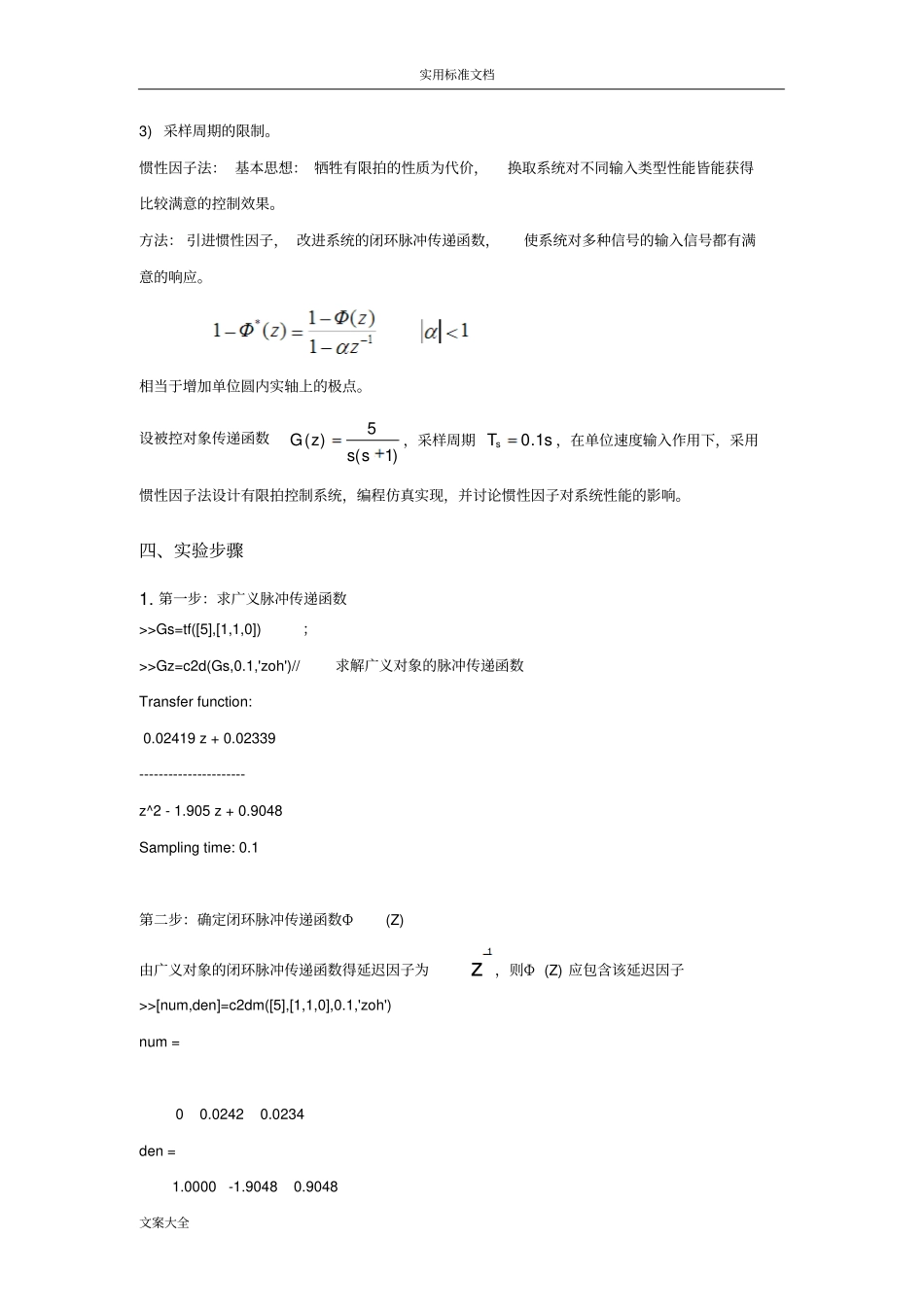
惯性因子法:基本思想:牺牲有限拍的性质为代价,换取系统对不同输入类型性能皆能获得比较满意的控制效果
方法:引进惯性因子,改进系统的闭环脉冲传递函数,使系统对多种信号的输入信号都有满意的响应
相当于增加单位圆内实轴上的极点
设被控对象传递函数)1(5)(sszG,采样周期sTs1
0,在单位速度输入作用下,采用惯性因子法设计有限拍控制系统,编程仿真实现,并讨论惯性因子对系统性能的影响
四、实验步骤1
第一步:求广义脉冲传递函数>>Gs=tf([5],[1,1,0]);>>Gz=c2d(Gs,0
1,'zoh')//求解广义对象的脉冲传递函数Transferfunction:0
02419z+0
02339----