LI(a)图1
1六杆铰链式破碎机(2)设计数据设计内容连杆机构的远动分析符号nLO2AL1L2h1h2lABlO4BLBCLO6C单位2r/minmm数据170100100094085010001250100011501960连杆机构远动的动态静力分析飞轮转动惯量的确定O6DG3JS3G4JS4G5JS5G6JS6mmNKgm2NKgm2NKgm2NKgm2600500025
520009200099000500
15(一)机构运动简图曲柄在1位置时,构件4在最低位置,以O2为圆心,以1350mm为半径画圆,以04为圆心,以1000mm为半径画圆,交于B点,连接
以O2为圆心,100mm为半径画圆,交O2B于点A,此时A点的位置便是1位置,顺时针旋转120°便得到5位置,再通过给定的数据确定其余构件的位置,做出机构运动简图1
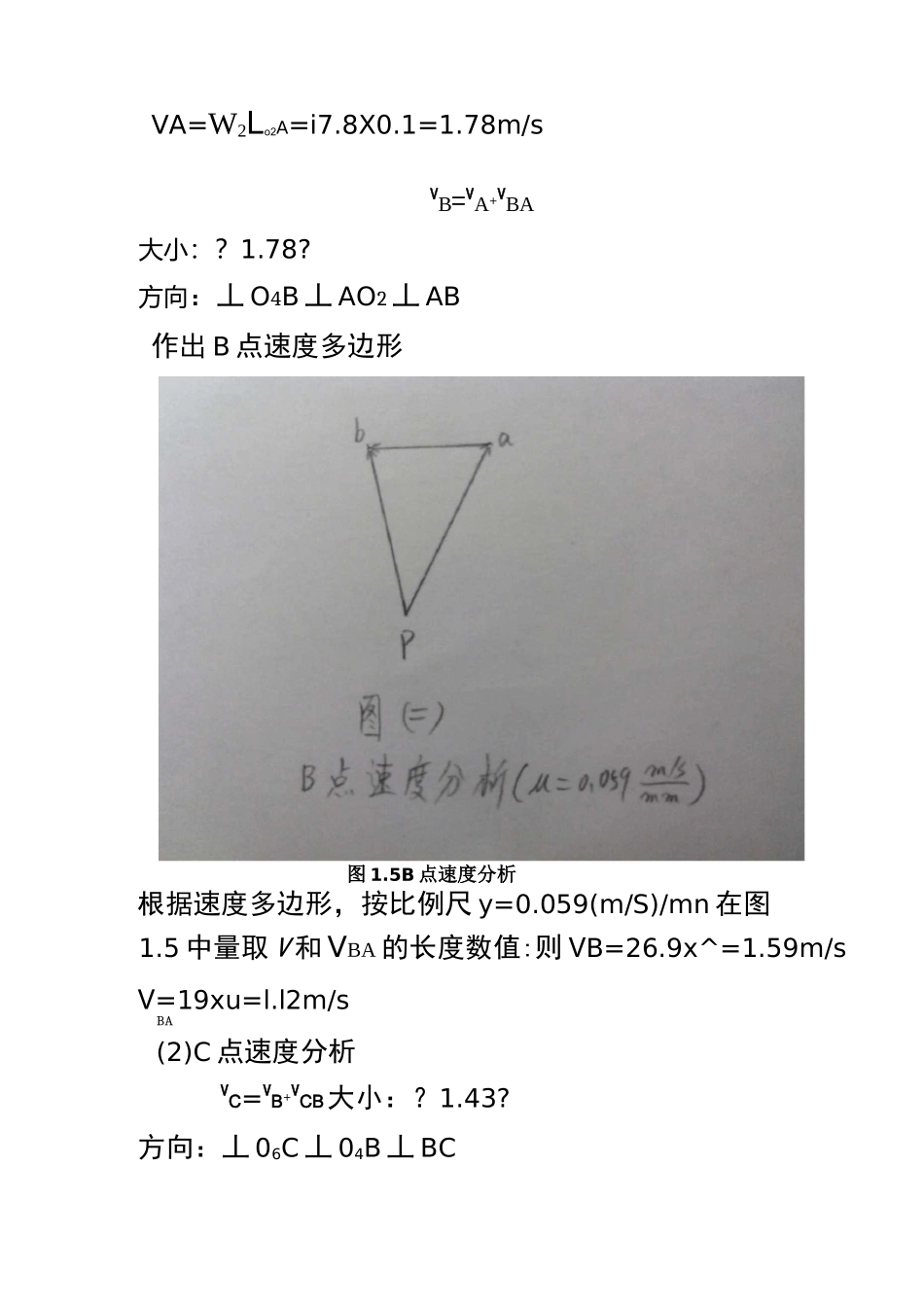
4机构运动简图(二)连杆机构速度分析1速度分析(1)B点速度分析n=170r/min=17/6r/sVA=W2Lo2A=i7
78m/sVB=VA+VBA大小:
方向:丄O4B丄AO2丄AB作出B点速度多边形图1
5B点速度分析根据速度多边形,按比例尺y=0
059(m/S)/mn在图1
5中量取V和VBA的长度数值:则VB=26
59m/sV=19xu=l
l2m/sBA(2)C点速度分析VC=VB+VCB大小:
方向:丄06C丄04B丄BC作出C点速度多边形(乳也/夕碎(心认旳笹,图1
6C点速度分析根据速度多边形,按比例尺y=0
059(m/S)/m在图1
6中量取Vc和VCB的长度数值:VC=7
45m/sVcB=25
53m/s(三)连杆机构加速度分析:a=AOx32=31
7m/s2A22an二V2/BO=2
53m/s2BB4an=V2/BA=1