基于MATLAB/SIMULINK的无刷直流电动机系统仿真无刷直流电机(BrushlessDCMotor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM控制系统仿真模型
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性
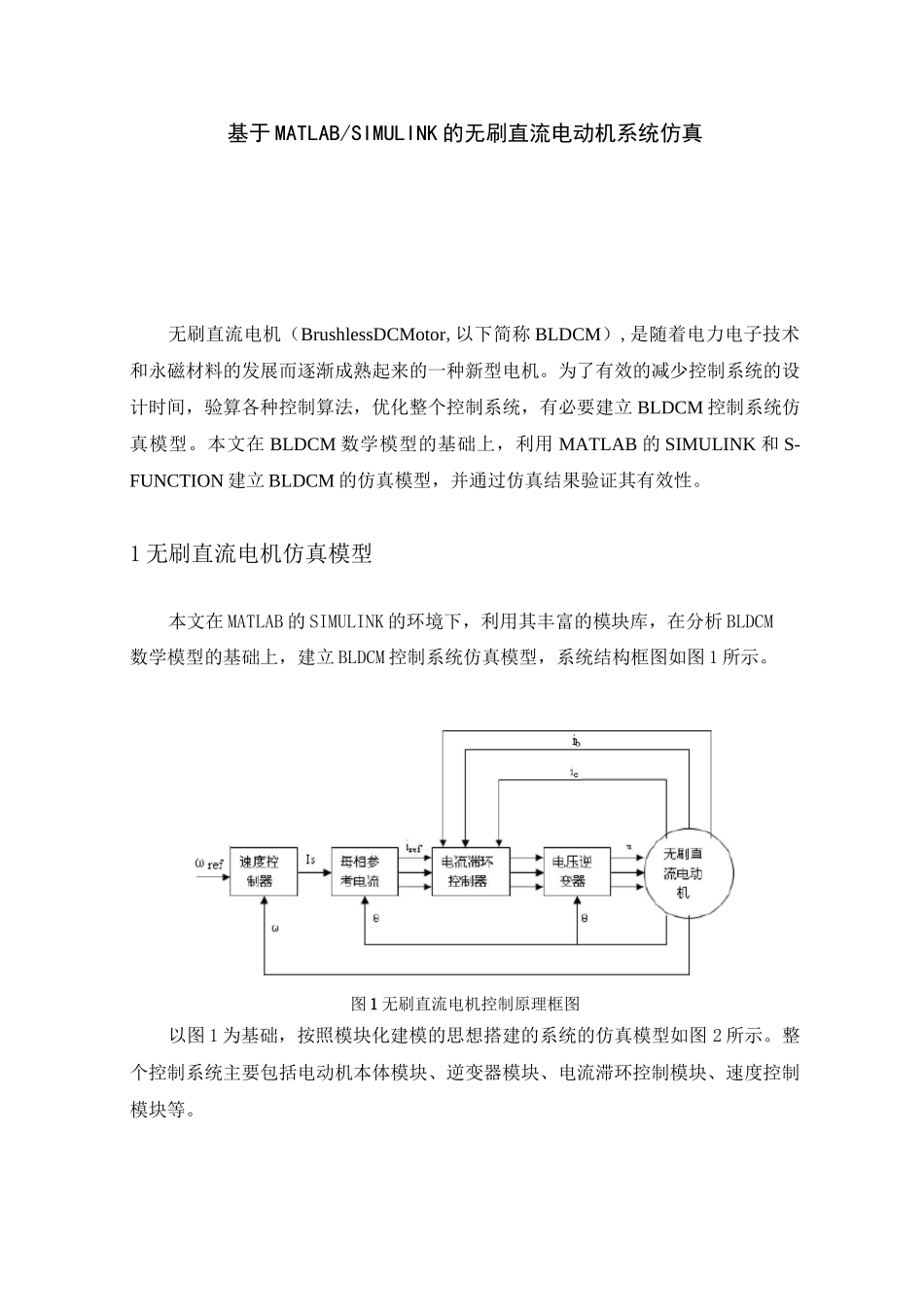
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示
图1无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等
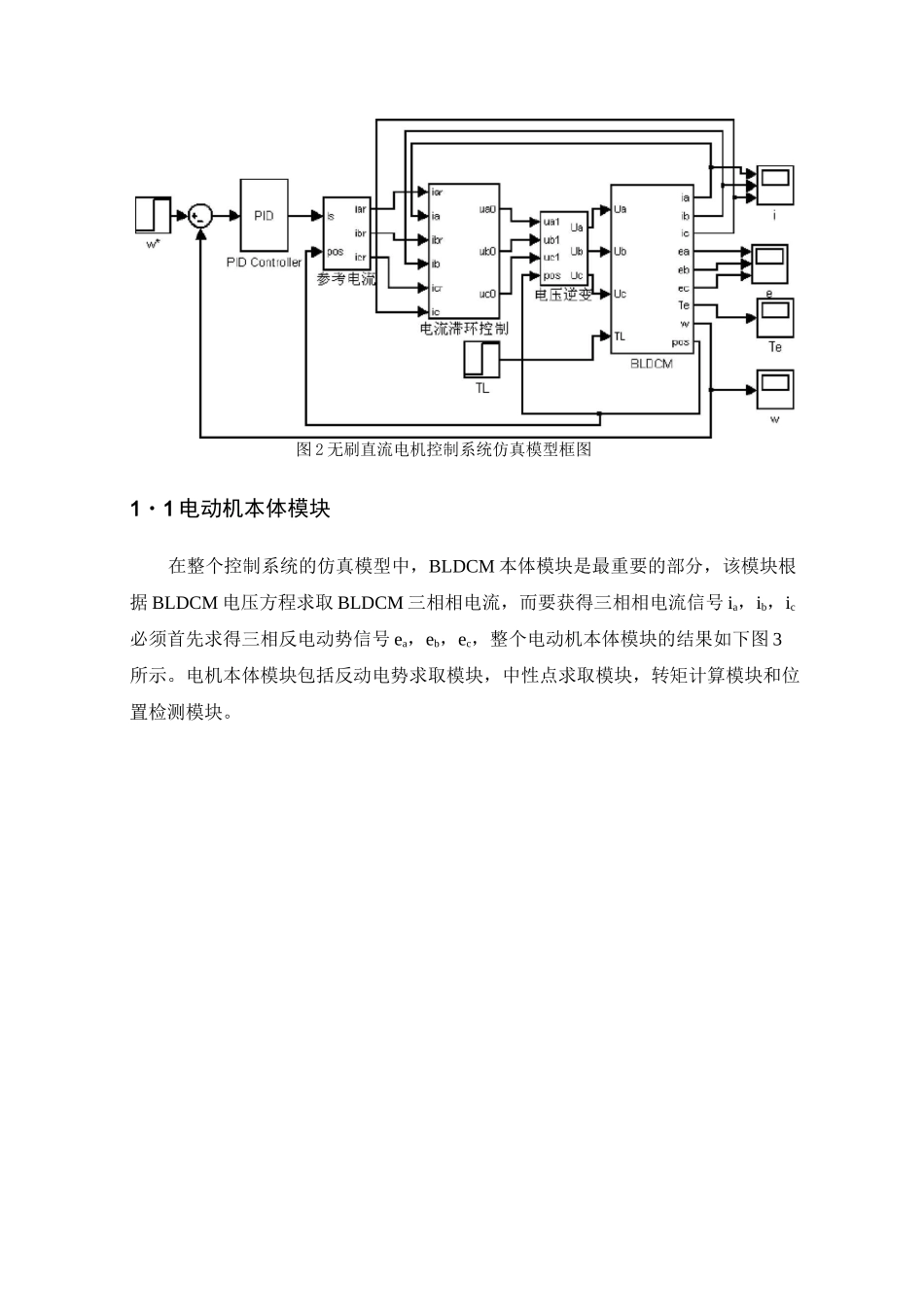
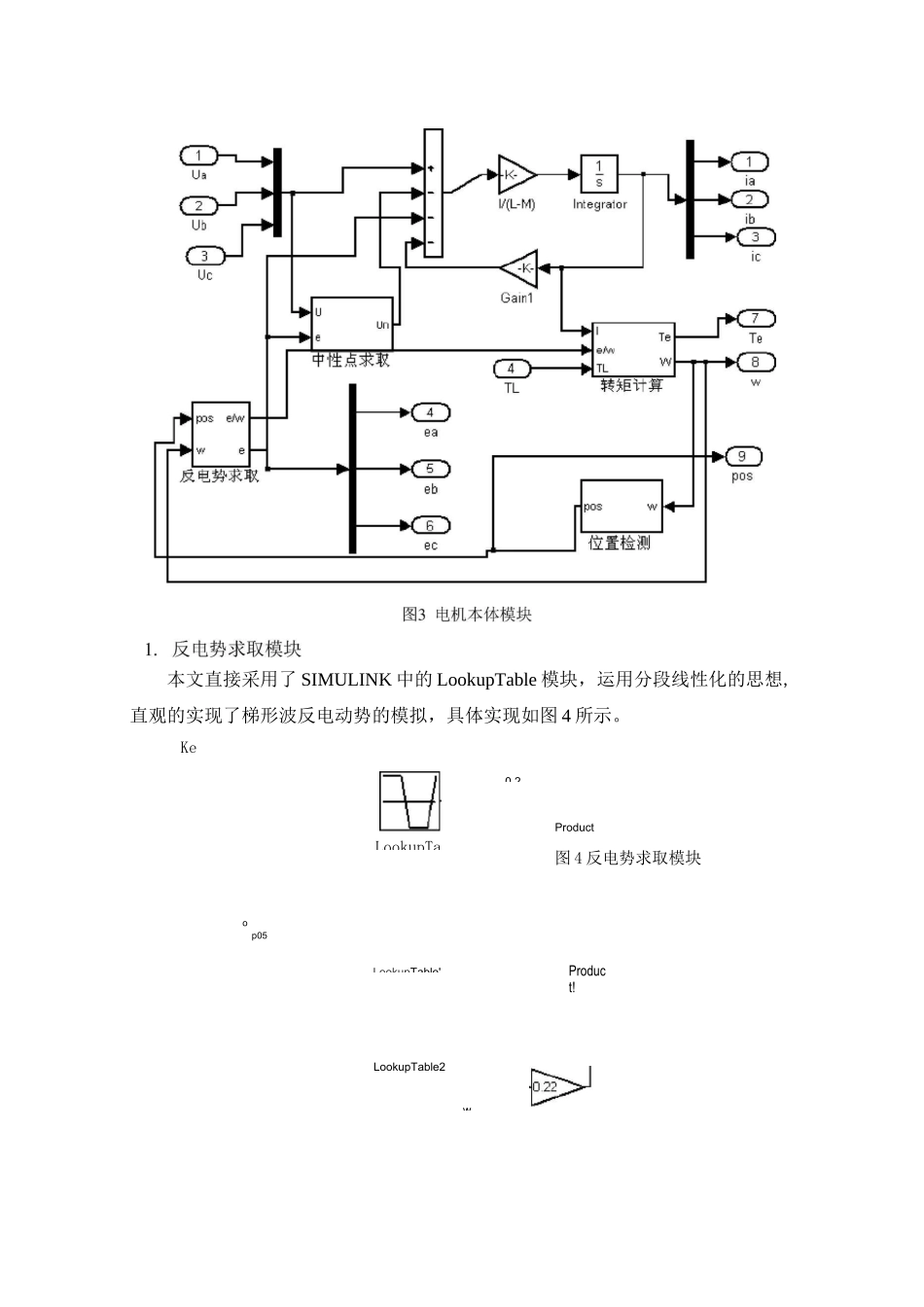
图2无刷直流电机控制系统仿真模型框图1・1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号ia,ib,ic必须首先求得三相反电动势信号ea,eb,ec,整个电动机本体模块的结果如下图3所示
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块
2op05LookupTable'Product
LookupTable2w本文直接采用了SIMULINK中的LookupTable模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示
KeProduct图4反电势求取模块LookupTaLookupTable模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至LookupTable模块中,就能得到其单位理想波形,