第三届全国大学生机械创新设计大赛慧鱼组预赛项目“全自动植树机”设计说明书设计者冯建国、江黄、马具锋、臧俊、邸铁彪设计单位合肥学院设计部门机械工程系指导教师王勇时间2007年9月安徽·合肥目录一、设计背景二、作品功能及指标三、机构设计四、运动和动力分析五、控制设计六、作品创新点七、应用前景八、总结与感谢九、主要参考文献附录:实物照片一、设计背景地球是人类唯一的家园,随着工业化不断发展,环境问题日益严重,沙漠化、水土流失、沙尘暴已经越来越严重地影响到人类的生存和发展,解决这些问题已到了刻不容缓的地步
人类无节制地砍伐森林是产生这些环境问题的主要原因
森林作为“地球之肺”,是地球气候变化的指挥棒,它不仅能够提供大量木材,还具有涵养水源、保持水土、防风固沙、保护农田、净化大气、防治污染等生态效益
所以植树造林是保护环境的一大重要举措
目前正在实施的“三北防护林”工程被称为“绿色万里长城,它地跨东北西部、华北北部和西北大部分地区,东西长4480公里,南北宽560~1460公里,总面积406.9万平方工公里,占国土面积的42.2%,接近我国的半壁江山
由于这些情况,我国迫切需要快速、高效的植树方法及装备
图1-1沙漠化和荒漠化现象的危害机器植树作为一种新型的植树方法,它比传统的人工植树具有两大优点,一是效率高,二是树苗成活率也高
植树机设计思路是:机器代替人自动完成植树过程
现有的植树装置自动化程度偏低,操作时需要有多人辅助作业,而且体积庞大、功能单一,不适合种植多种苗木,这些不足限制了植树机的推广应用
针对上述情况,我们提出一种新的方案:设计一种自动植树机,在无人控制的情况下,完成植树过程
植树机可由普通轻型卡车改装而成,可种植多种树苗,大幅降低植树成本
具有高效率、低成本、适用范围广的特点
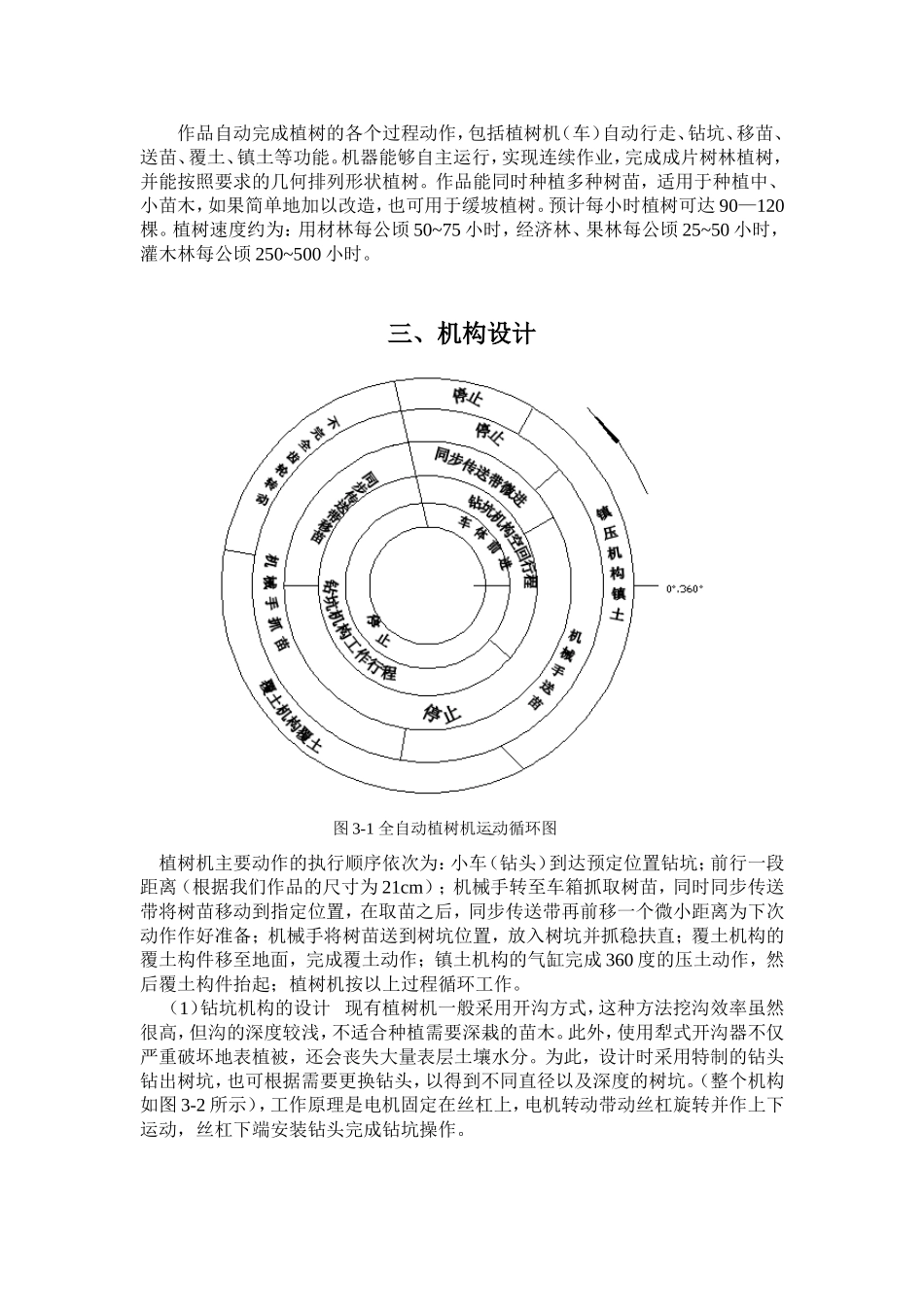
二、作品的功能及指标作品自动完成植树的各个过程动作,包括植树机(车)自动行走、钻坑、移苗、送