1交流调速原理及应用第一单元交流调速的原理——异步电机变压变频调速系统(VVVF系统)异步电机的变压变频调速系统一般简称为变频调速系统
由于在调速时转差功率不随转速而变化,调速范围宽,无论是高速还是低速时效率都较高,在采取一定的技术措施后能实现高动态性能,可与直流调速系统媲美,因此现在应用面很广
第一节变压变频调速的基本控制方式定子每相电动势mNs1gS44
4ΦkNfE只要控制好Eg和f1,便可达到控制磁通m的目的,对此,需要考虑基频(额定频率)以下和基频以上两种情况
1、基频以下调速要保持m不变,当频率f1从额定值f1N向下调节时,必须同时降低Eg,使常值1fEg即采用恒值电动势频率比的控制方式
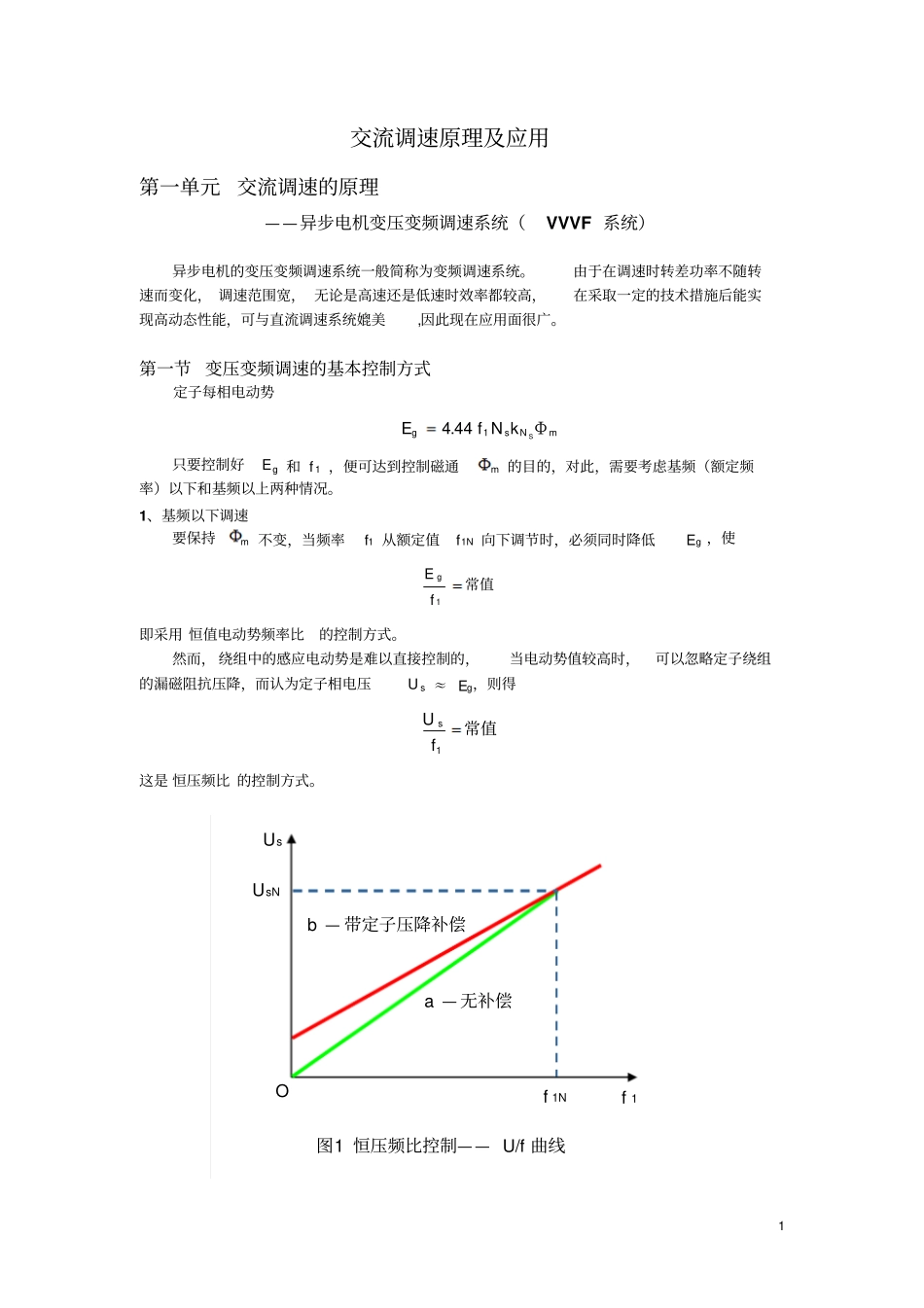
然而,绕组中的感应电动势是难以直接控制的,当电动势值较高时,可以忽略定子绕组的漏磁阻抗压降,而认为定子相电压Us≈Eg,则得常值1fUs这是恒压频比的控制方式
OUsf1图1恒压频比控制——U/f曲线UsNf1Na—无补偿b—带定子压降补偿2但是,在低频时Us和Eg都较小,定子阻抗压降所占的份量就比较显著,不再能忽略
这时,需要人为地把电压Us抬高一些,以便近似地补偿定子压降
带定子压降补偿的恒压频比控制特性示于图1中的b线,无补偿的控制特性则为a线
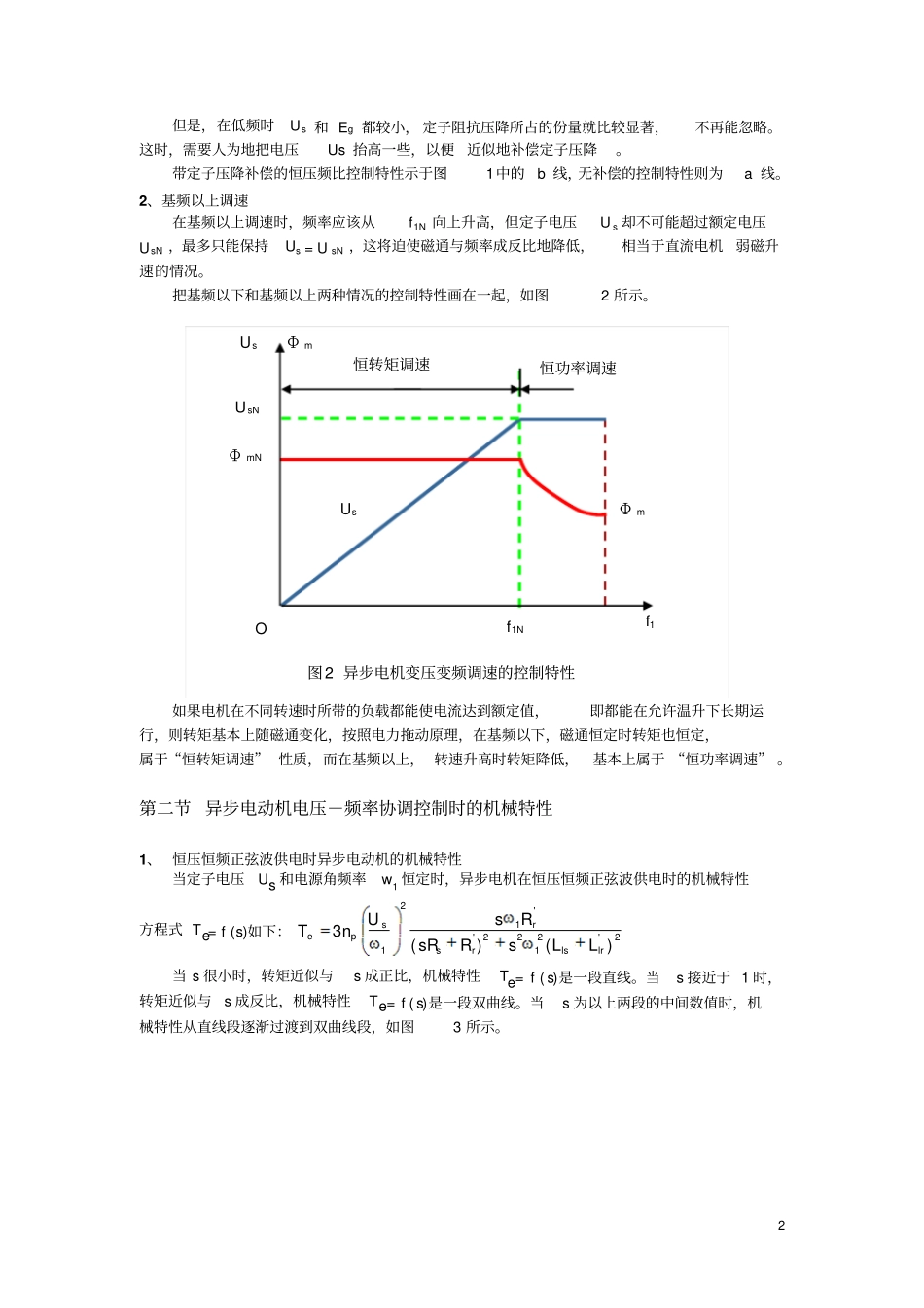
2、基频以上调速在基频以上调速时,频率应该从f1N向上升高,但定子电压Us却不可能超过额定电压UsN,最多只能保持Us=UsN,这将迫使磁通与频率成反比地降低,相当于直流电机弱磁升速的情况
把基频以下和基频以上两种情况的控制特性画在一起,如图2所示
如果电机在不同转速时所带的负载都能使电流达到额定值,即都能在允许温升下长期运行,则转矩基本上随磁通变化,按照电力拖动原理,在基频以下,磁通恒定时转矩也恒定,属于“恒转矩调速”性质,而在基频以上,转速升高时转矩降低,基本上属于“恒功率调速”
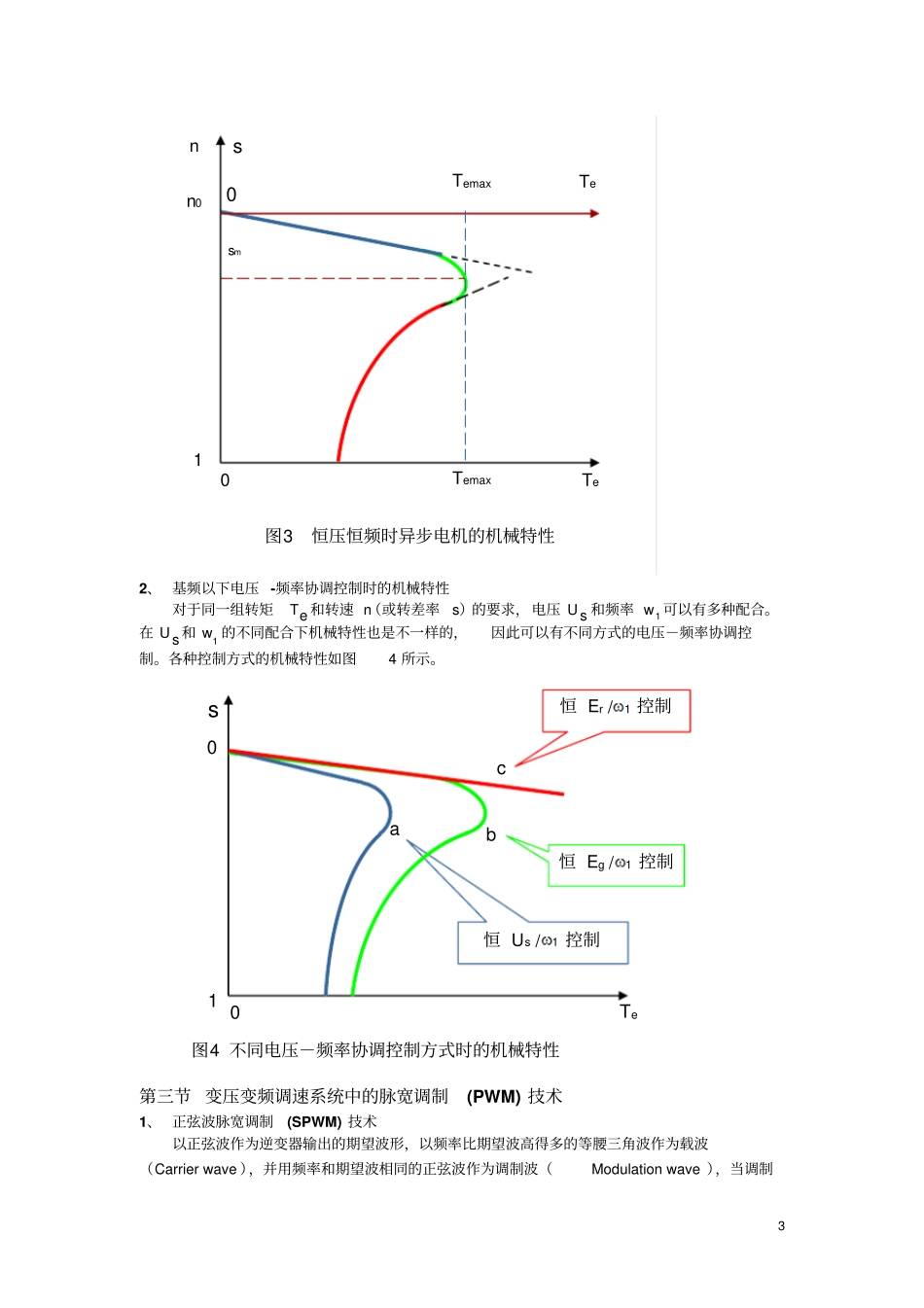
第二节异步电动机电压-频率协调控制时的机械特性