最佳线性滤波理论起源于40年代美国科学家Wiener和前苏联科学家Kолмогоров等人的研究工作,后人统称为维纳滤波理论
从理论上说,维纳滤波的最大缺点是必须用到无限过去的数据,不适用于实时处理
为了克服这一缺点,60年代Kalman把状态空间模型引入滤波理论,并导出了一套递推估计算法,后人称之为卡尔曼滤波理论
卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值
它适合于实时处理和计算机运算
现设线性时变系统的离散状态防城和观测方程为:X(k)=F(k,k-1)·X(k-1)+T(k,k-1)·U(k-1)Y(k)=H(k)·X(k)+N(k)其中X(k)和Y(k)分别是k时刻的状态矢量和观测矢量F(k,k-1)为状态转移矩阵U(k)为k时刻动态噪声T(k,k-1)为系统控制矩阵H(k)为k时刻观测矩阵N(k)为k时刻观测噪声则卡尔曼滤波的算法流程为:1
预估计X(k)^=F(k,k-1)·X(k-1)2
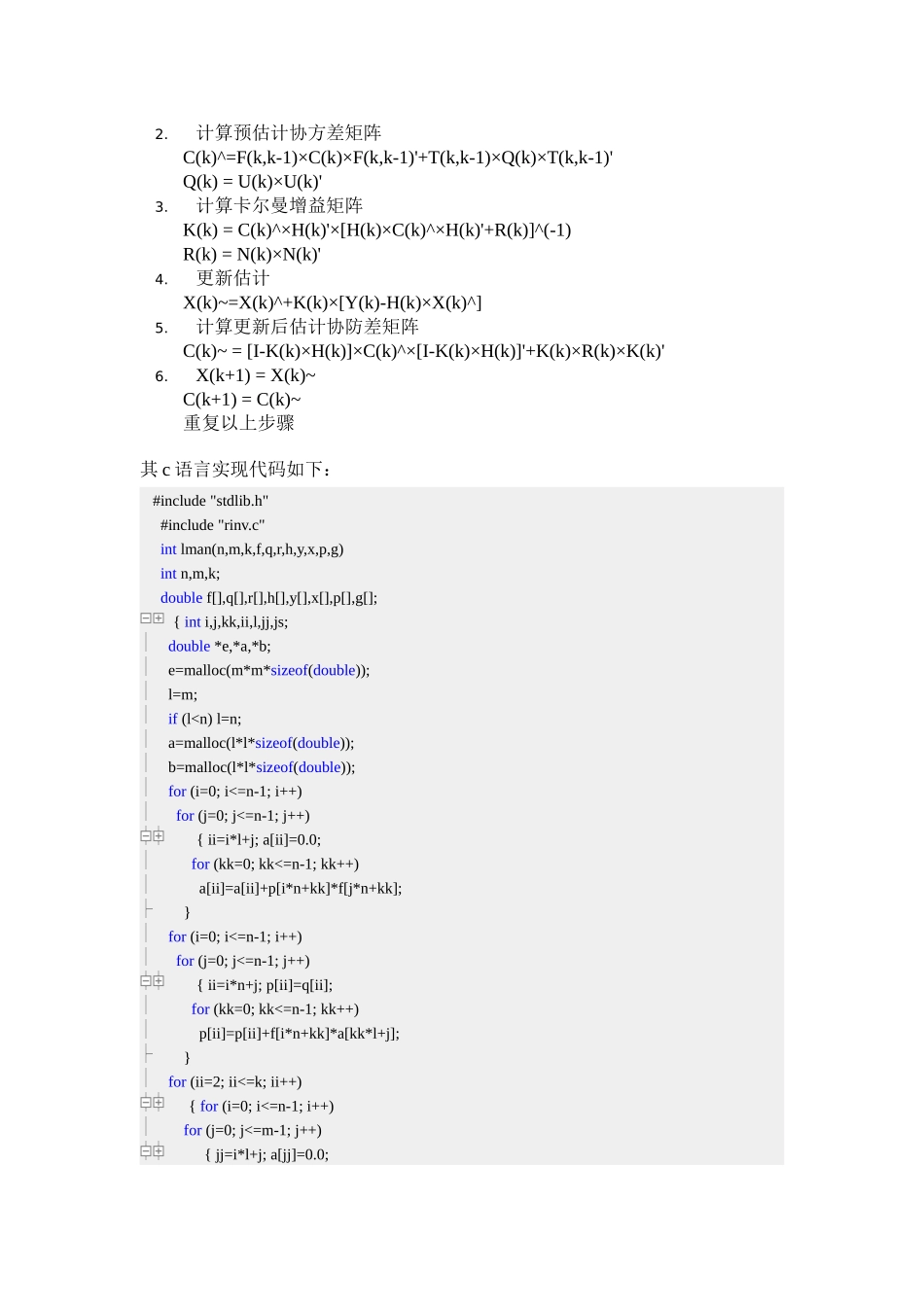
计算预估计协方差矩阵C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)'Q(k)=U(k)×U(k)'3
计算卡尔曼增益矩阵K(k)=C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1)R(k)=N(k)×N(k)'4
更新估计X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^]5
计算更新后估计协防差矩阵C(k)~=[I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)'6
X(k+1)=X(k)~C(k+1