PMSMPMSM的问题的问题控制比直流伺服电机要复杂的多;控制比直流伺服电机要复杂的多;要想实现力矩控制,必须有角位置传感器,以测要想实现力矩控制,必须有角位置传感器,以测量量d-qd-q坐标系的旋转角;坐标系的旋转角;反电势必须是正弦波的,这对电机制造及工艺提反电势必须是正弦波的,这对电机制造及工艺提出了较高的要求
出了较高的要求
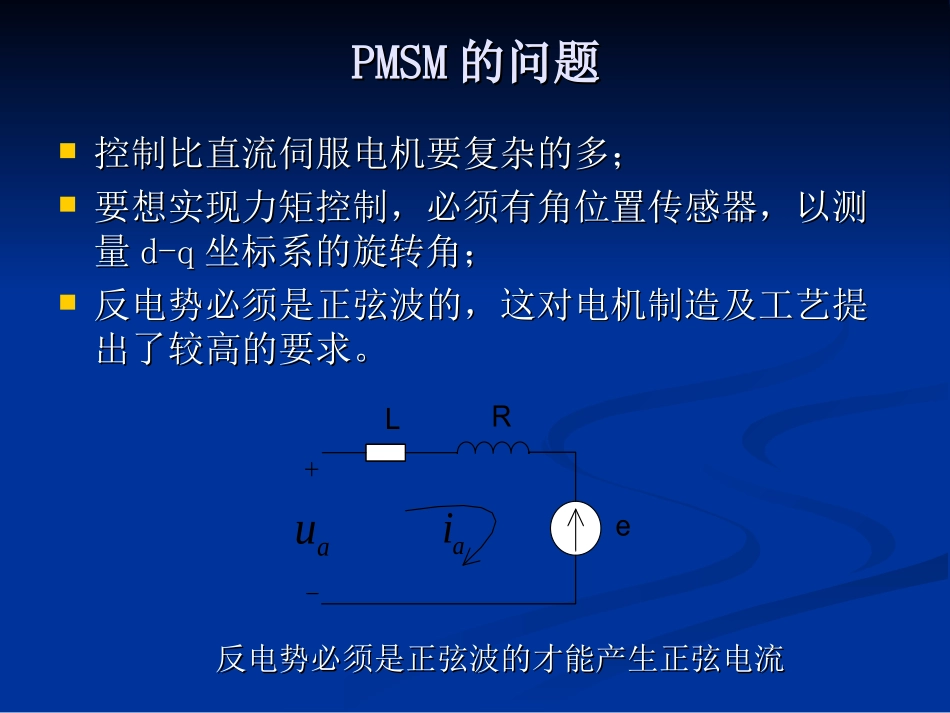
auaieLR反电势必须是正弦波的才能产生正弦电流反电势必须是正弦波的才能产生正弦电流3
3无刷直流电动机无刷直流电动机((BrushlessDirectCurrentMoBrushlessDirectCurrentMotor,BLDCtor,BLDC))11、无刷直流电动机结构、无刷直流电动机结构22、无刷直流电动机工作原理、无刷直流电动机工作原理33、无刷直流电动机电机特性、无刷直流电动机电机特性44、、PWMPWM控制技术控制技术1
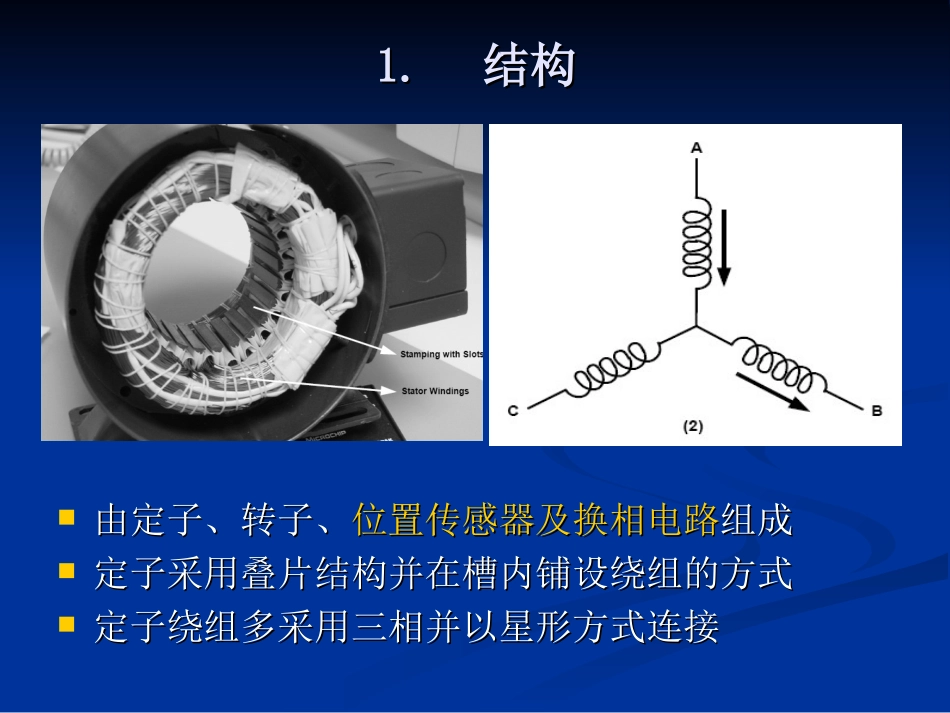
结构结构由定子、转子、由定子、转子、位置传感器及换相电路位置传感器及换相电路组成组成定子采用叠片结构并在槽内铺设绕组的方式定子采用叠片结构并在槽内铺设绕组的方式定子绕组多采用三相并以星形方式连接定子绕组多采用三相并以星形方式连接将永磁体贴装在非导磁材料表面或镶嵌在其内构成
将永磁体贴装在非导磁材料表面或镶嵌在其内构成
大部分大部分BLDCBLDC采用表面安装方式
采用表面安装方式
多为多为22到到33对极的
磁性材料多采用具有高磁通密度的稀土材料,如銣磁性材料多采用具有高磁通密度的稀土材料,如銣铁硼等铁硼等结构上结构上BLDCBLDC与与PMSMPMSM有些相似,但有两点不同:有些相似,但有两点不同:BLDCBLDC的转子磁极经专门的磁路设计,可获得梯形波的气隙的转子磁极经专门的磁路设计,可获得梯形波的气隙磁场
而PMSMPMSM的的气隙磁场是正弦波的