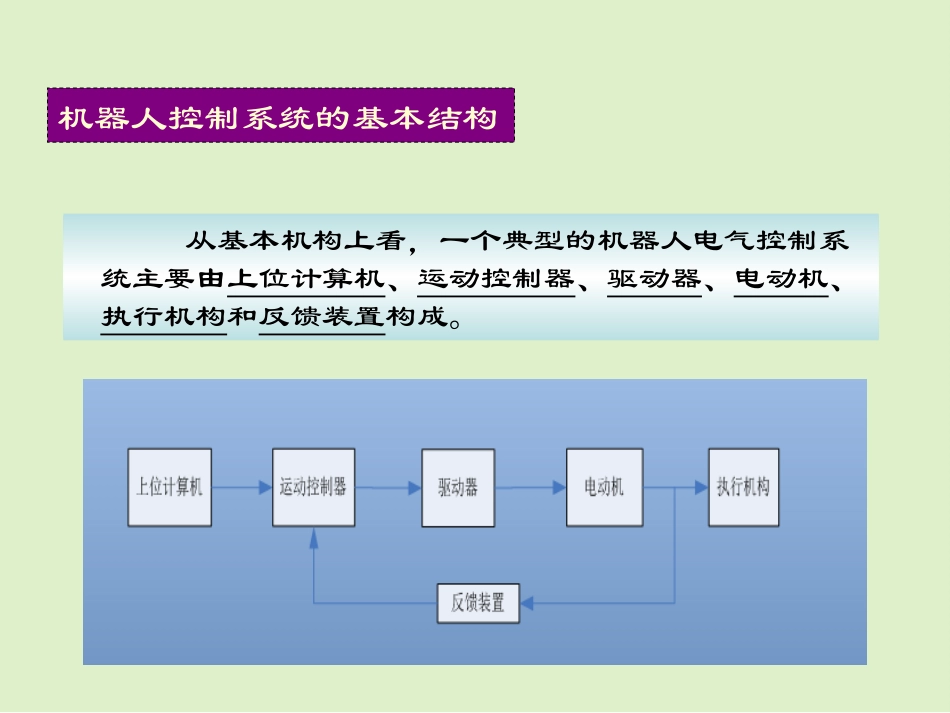
工业机器人电气控制系统简述机器人电气控制系统概述机器人控制系统的基本结构工业机器人控制系统构成方案比较机器人的关键部件简介常用可编程控制器PLC机器人控制系统的基本结构从基本机构上看,一个典型的机器人电气控制系统主要由上位计算机、运动控制器、驱动器、电动机、执行机构和反馈装置构成
工业机器人控制系统构成方案比较基于PLC的运动控制基于PC+运动控制卡的运动控制纯PC机控制基于PLC的运动控制PLC进行运动控制有两种:1、利用PLC的某些输出端口使用脉冲输出指令来产生脉冲驱动电机,同时使用通用I/O或者计数部件来实现电机的闭环位置控制;2、使用PLC外部扩展的位置模块来进行电机的闭环位置控制,从而可以大大提高运动控制的速度和精度
基于PC+运动控制卡的机器人控制单纯的PC控制完全采用PC机的全软件形式的机器人系统
在高性能工业PC和嵌入式PC(配备专为工业应用而开发的主板)的硬件平台上,可通过软件程序实现PLC和运动控制等功能,实现机器人需要的逻辑控制和运动控制
当然,PC机同时具有高性能的任务管理功能和人机交互功能
在通过高速的工业总线进行PC与驱动器的实时通讯,显著的提高机器人的生产效率和灵活性
不过,在提供灵活的应用平台的同时,也大大提高了开发难度和延长了开发周期
由于其结构的先进性,这种结构代表了未来机器人控制结构的发展方向
机器人的关键部件简介编码器驱动器传感器编码器闭环控制是提高机器人控制系统运动精度的重要手段,而位置检测传感器则是构成闭环控制必不可少的重要元件
位置检测传感器对控制对象的实际位置进行检测,并将位置信息传送给运动控制器,由运动控制器根据控制对象的实际值调整输出信号
常用的位置传感器有电位器、编码器、光栅尺、差动变压器、旋转变压器等
以输出信号来分,有增量型编码器和绝对型编码器
工业机器人电机都是应用的绝对编码器
交流伺服电机驱动