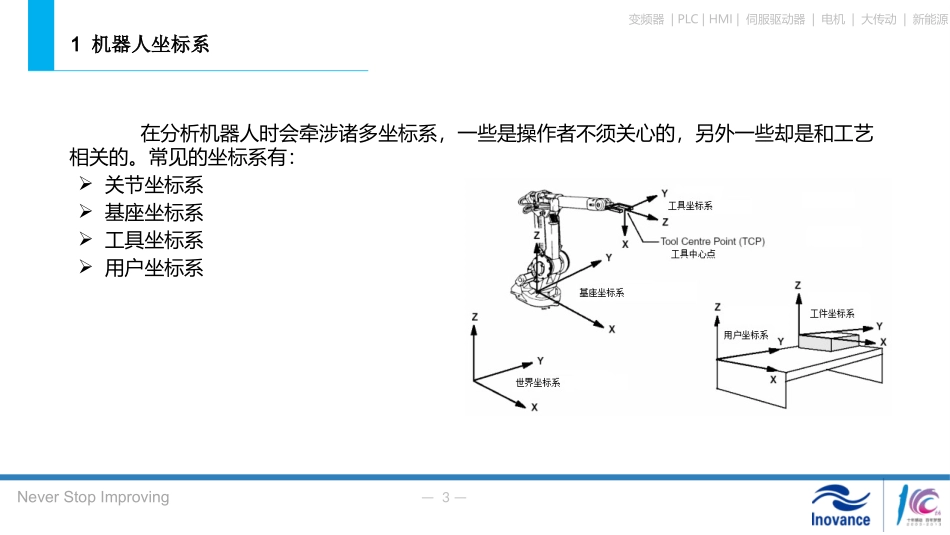
NeverStopImproving变频器|PLC|HMI|伺服驱动器|电机|大传动|新能源—1—汇川技术2016年12月工业机器人技术基础(2)NeverStopImproving变频器|PLC|HMI|伺服驱动器|电机|大传动|新能源—2—目录11机器人位姿变换机器人位姿变换22机器人运动学机器人运动学33机器人坐标系机器人坐标系44机器人动力学机器人动力学55机器人性能指标机器人性能指标NeverStopImproving变频器|PLC|HMI|伺服驱动器|电机|大传动|新能源—3—在分析机器人时会牵涉诸多坐标系,一些是操作者不须关心的,另外一些却是和工艺相关的
常见的坐标系有:关节坐标系基座坐标系工具坐标系用户坐标系1机器人坐标系NeverStopImproving变频器|PLC|HMI|伺服驱动器|电机|大传动|新能源—4—关节坐标系主要描述各关节相对于标定零点的绝对位置,旋转轴常用°表示,线性轴的常用mm描述
作用:单轴点动:单轴示教机器人,常用于调试时验证关节的旋转方向、软限位;解除机器人奇异位置,当机器人出现奇异报警时,只能在关节坐标系下通过单轴点动解除奇异报警;轴正负极限报警:只能在关节坐标系下通过单轴点动解除正负超限报警;关节坐标系下的坐标值均为机器人关节的绝对位置,方便用户调试点位时观察机器人的绝对位置,避免机器人出现极限位置或奇异位置关节坐标系1机器人坐标系NeverStopImproving变频器|PLC|HMI|伺服驱动器|电机|大传动|新能源—5—工业机器人基础知识直角坐标系,包括很多种,但我们常常狭隘的将基座坐标系称为直角坐标系
直角坐标系的Z轴即第一轴的Z轴,X轴为回零后的正前方,Y轴由右手定则确定
原点随着df参数的大小上下变动
直角坐标系下,用户可控制机器人末端沿坐标系任一方向移动或旋转,常用于现场点位示教
直角坐标系机器人末端