第二章工业机器人机械系统设计工业机器人机械系统设计2
1工业机器人总体设计机器人总体设计一般包括两个部分:系统分析与技术设计
系统分析明确机器人的目的和任务分析机器人所在系统的工作环境、机器人与已有设备的兼容性确定机器人的基本功能和设计方案,确定具体技术指标进行必要调查研究工业机器人机械系统设计2
1工业机器人总体设计机器人总体设计一般包括两个部分:系统分析与技术设计
技术设计基本参数:自由度,作业范围,运动速度,承载能力,定位精度
:基本参数、运动形式、传感系统、控制方案、机械结构运动形式:直角坐标,圆柱坐标,球(极)坐标,关节坐标,SCARA
检测传感系统方案,控制系统方案
机械结构设计
工业机器人机械系统设计2
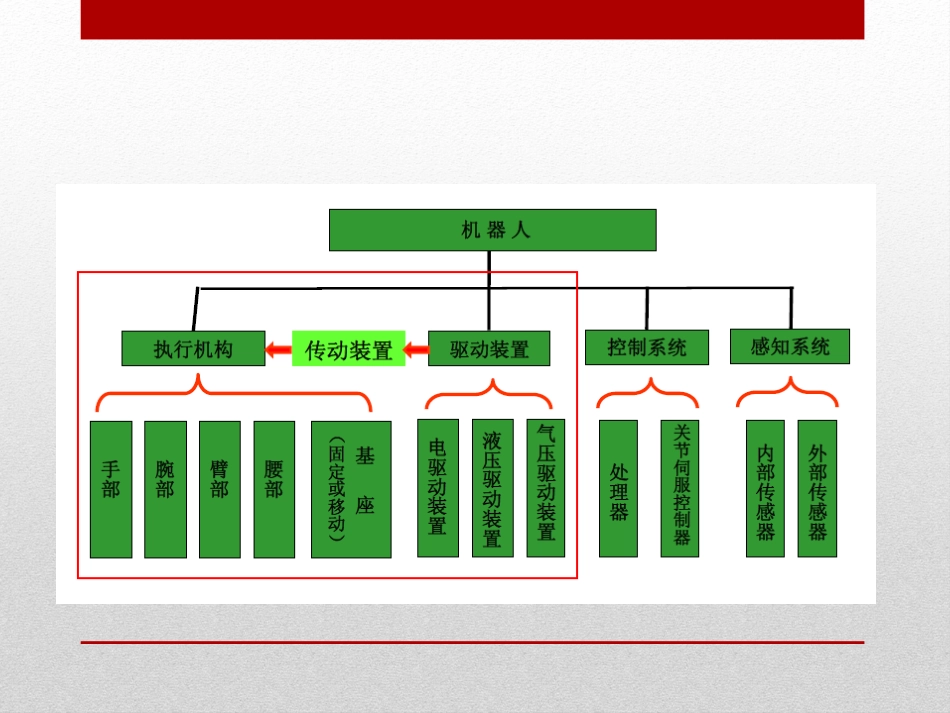
2驱动机构驱动机构用于将驱动元件的运动传递到机器人的关节和动作部位
分为直线驱动机构和旋转驱动机构
工业机器人机械系统设计液压驱动方式易获得较大推力或扭矩工作平稳、位置精度高易实现力、速度、方向自动控制机械效率高,使用寿命长油液黏度随温度变化影响工作性能,易燃易爆液体易泄漏需要专门的供油系统优点不足2
1驱动方式工业机器人机械系统设计气压驱动方式空气黏度小,易达到高速使用安全,适用于恶劣工作环境价格低廉能实现过载保护单位体积能提供的动力小工作平稳性差,位置精度低除水麻烦噪声污染优点不足工业机器人机械系统设计利用电动机直接驱动机械传动装置
能源简单、使用方便、机构速度变化范围大、机械效率高、位置精度高,噪声低
电气驱动步进电机伺服电机直流伺服电机交流伺服电机电气驱动方式工业机器人机械系统设计工业机器人机械系统设计2
2驱动机构工业机器人机械系统设计2
2驱动机构常用的直线驱动机构包括:齿轮齿条装置齿条(4)固定,齿轮(3)转动时拖板(1)沿着齿条方向做直线运动
该装置的回差较大
2直线驱动机构工业机器人机械系统设