工业机器人应用技术论文论文题目:工业机器人论文编号:811151801261论工业机器人摘要:机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多种学科而形成的高新技术
机器人一般是由机械本体、控制器、伺服驱动系统和检测传感装置构成,是一种综合了人和机器的特长、能在三维空间完成各种作业的机电一体化装置
它具有人对环境状态的反应,也有机器可以长时间工作、精确度高、坑恶劣环境的能力,可以用来完成人类无法完成的工作
随着电脑技术、电子产品及生物遗传工程等技术的大踏步的发展,机器人的研发热潮已经从实验室走进了生产流水线,走进了人类的生活
关键词:机器人组成分类应用正文:一、工业机器人的组成工业机器人一般由机械结构系统、伺服驱动系统、检测装置和控制系统四个基本部分组成
大多数机器人有3~6个运动自由度,其腕部通常有1~3个运动自由度
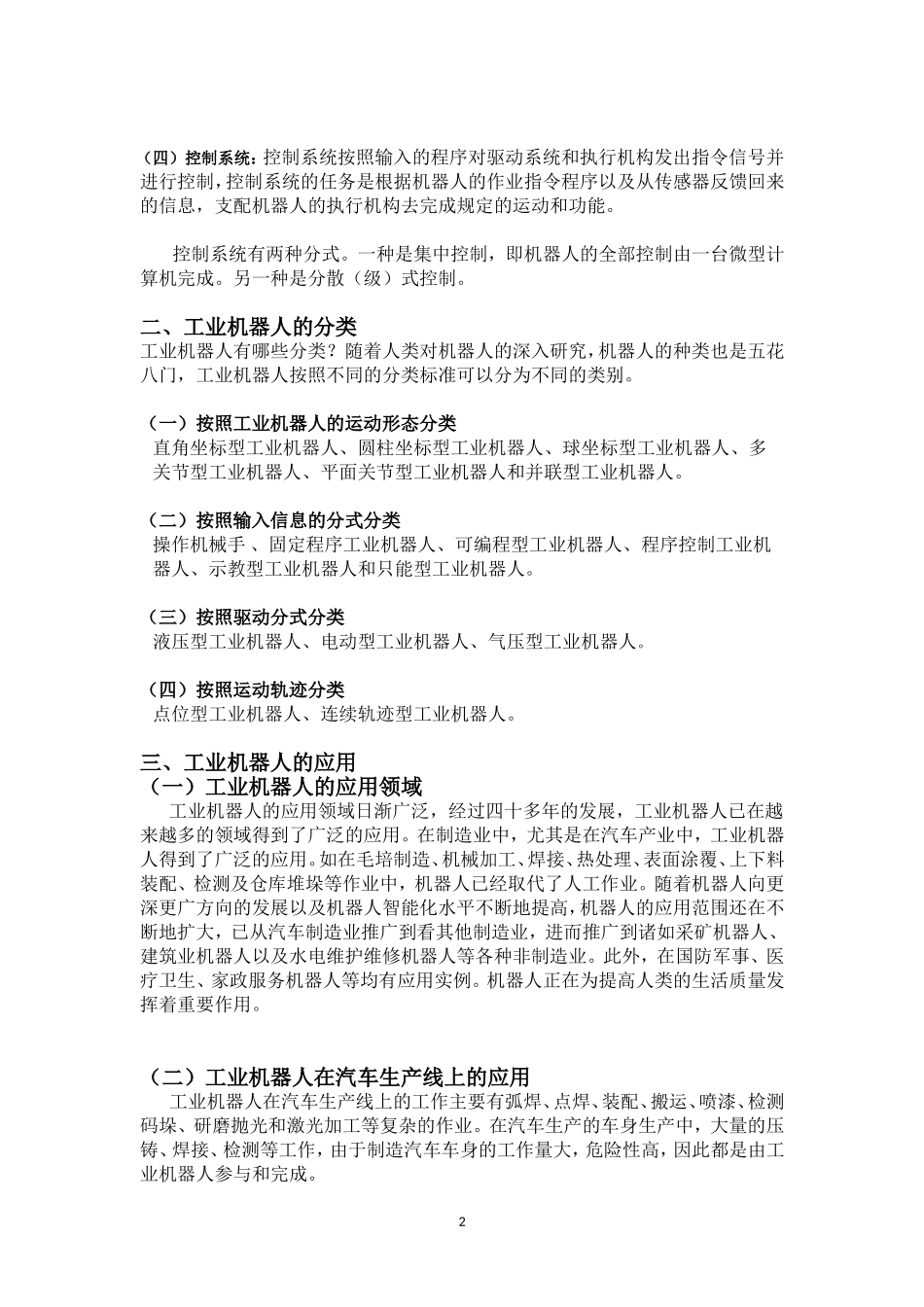
(一)机械结构系统:即机器人‘‘本体’’,由机身、手臂、手腕和末端执行器四大件组成
图1机器人机械结构系统1--手部(末端执行器);2--手腕;3--手臂;4--机身(二)伺服驱动系统:伺服驱动系统包括动力装置和传动机构,用于使执行机构产生相应的动作
(三)检测装置:由内部传感器和外部传感器组成,其作用就是获取机器人内部和外部的信息,并把这些信息反馈给控制系统
2(四)控制系统:控制系统按照输入的程序对驱动系统和执行机构发出指令信号并进行控制,控制系统的任务是根据机器人的作业指令程序以及从传感器反馈回来的信息,支配机器人的执行机构去完成规定的运动和功能
控制系统有两种分式
一种是集中控制,即机器人的全部控制由一台微型计算机完成
另一种是分散(级)式控制
二、工业机器人的分类工业机器人有哪些分类
随着人类对机器人的深入研究,机器人的种类也是五花八门,工业机器人按照不同的分类标准可以分为不同的类别
(一)按照工业机器人的运动形态分类