第 4 单元 学时数: 学时教学目的与要求:理解运动链的可动性及运动确定性的条件;能正确计算平面机构的自由度
教学重点与难点:重点:平面机构自由度的计算难点:自由度计算时应注意的特殊结构教学手段与方式:课堂讲授,教学内容:第一章 机械传动系统的运动分析 第三节 平面机构的自由度一、平面机构自由度的计算二、机构具有确定运动的条件三、计算平面机构的自由度时应注意的特殊结构第四节 机械传动系统的运动分析实例第一章 机械传动系统的运动分析第三节 平面机构的自由度一、平面机构自由度的计算1.平面机构自由度机构中各构件相对于机架所能有的独立运动的数目
构件的自由度S31231234θ1123两构件用运动副联接后,彼此的相对运动受到某些约束
低副引入两个约束
(图形见课件)高副引入一个约束
(图形见课件)2.机构自由度计算的一般公式F=3n-2PL-PHn —活动构件数;PL —低副数;PH —高副数例 1:计算曲柄滑块机构的自由度(动画见课件)解:活动构件数 n=3低副数 PL=4 高副数 PH=0F=3n - 2PL - PH =3×3 - 2×4 =1 例 2:计算五杆铰链机构的自由度解:活动构件数 n=4低副数 PL=5 F=3n - 2PL - PH =3×4 - 2×5=2 例 3:计算图示凸轮机构的自由度(动画见课件)解:活动构件数 n=2 低副数 PL=2高副数 PH=1F=3n - 2PL - PH =3×2 - 2×2 -1 ×1=1 F = 3×2 – 2×3= 0 (桁架) F = 3×3 – 2×5 = -1(超静定桁架)ABC321ABC321213233F112223F二、机构具有确定运动的条件1.机构自由度数 F≥1
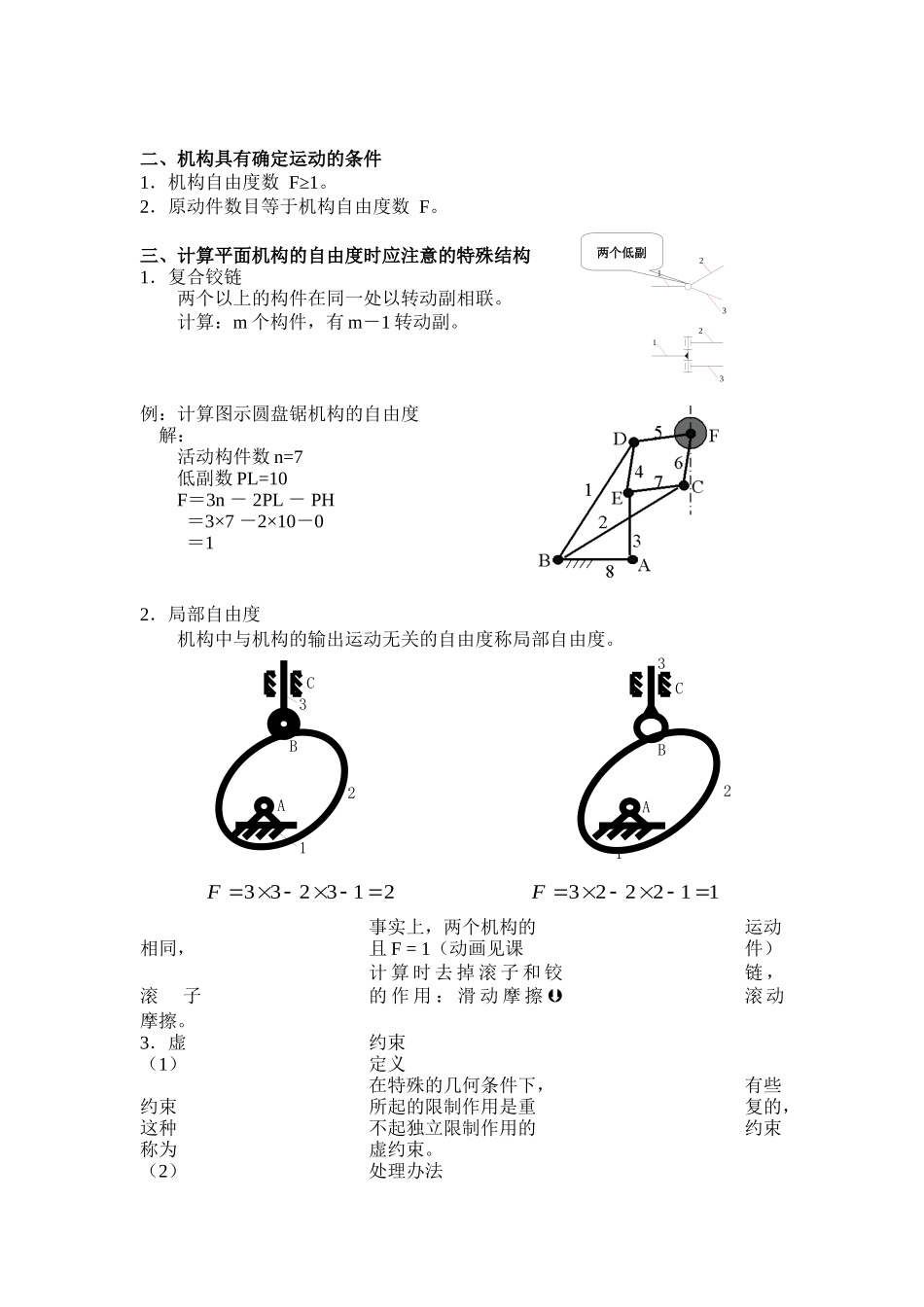
2.原动件数目等于机构自由度数 F
三、计算平面机构的自由度时应注意的特殊结构 1.复合铰链两个以上的构件在同一处以