fiisE^ili£»安川机器人外部 10 启动安川机器人的外部 10 启动运行,即通过外部信号控制机器人启动、暂停、复位、选择主程序和运行程序
一、安川机器人机械安全端子台基板(JANCD-YFC22-E)1、机械安全 I/O 基板(JANCD-YSF22B-E)血、eraKKn1/Di/PaUr(FrfCPl^rebate-2nh»»5』)说 IM;led 和 pri 加拈理0T,SfBCK,LUB1F
IXiUXFAM~TL2、安全端子台基板接线外引(1)机械安全端子台基板(JANCD-YFC22-E)是为了连接安全输出、输入信号等专用外部信号的端子台基板
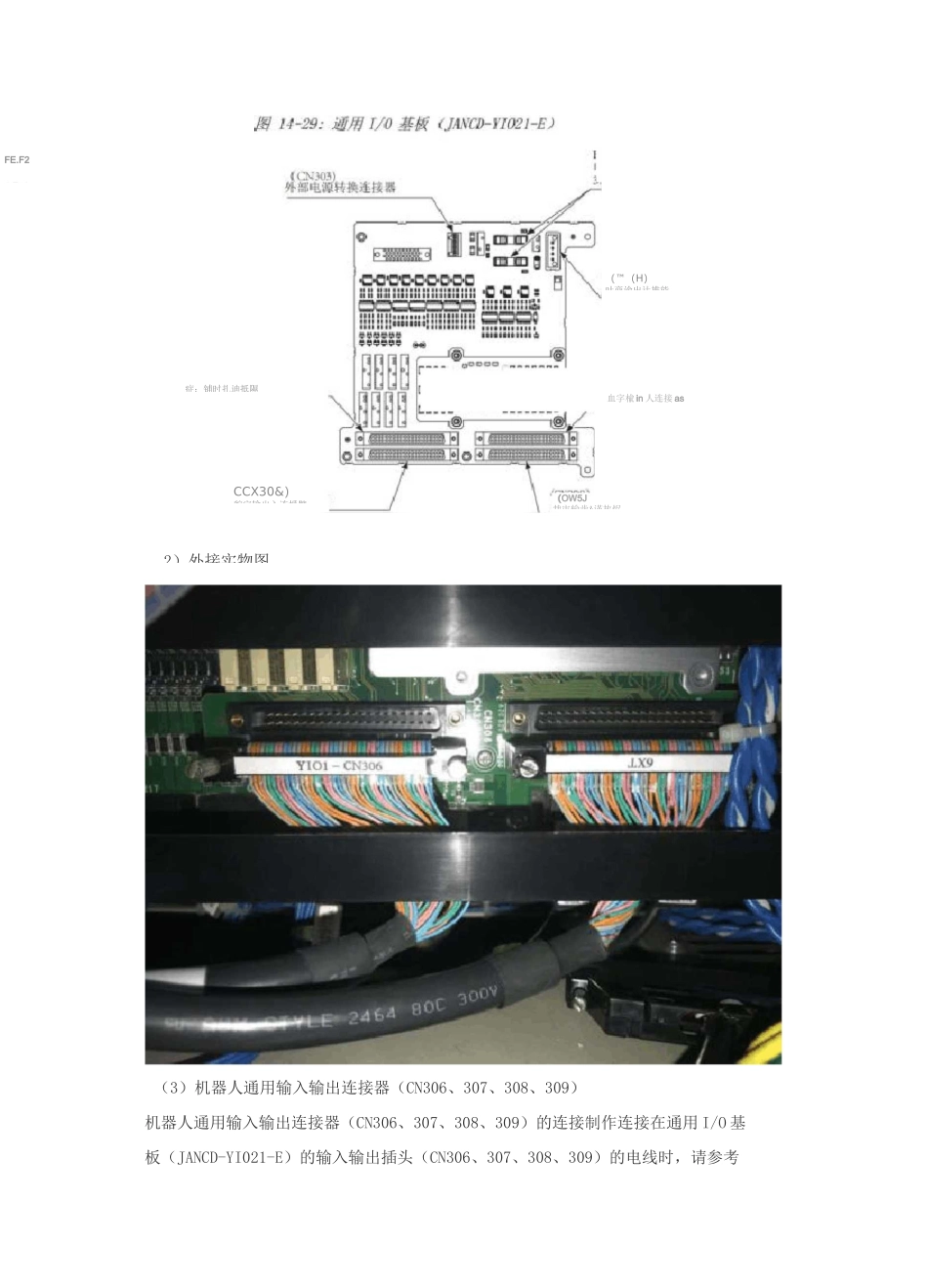
图 MTQ:枇被安全端子台基糠(JA\CD-YFC22-E)2)安全端子基台实物图片3、安全段子台基板 100 个端口作用 JANCD-YFC22-E 连接端子表二、安川机器人通用 I/O 基板(JANCD-YI021-E)1、通用 10 基板插头外接(1)电箱背板插头DUCDDa=MCaac3D 口皿nac0D«*«=■D[]DDDG[]D(3C]£3口口□□onoDBssenncnBcno(3)机器人通用输入输出连接器(CN306、307、308、309)机器人通用输入输出连接器(CN306、307、308、309)的连接制作连接在通用 I/O 基板(JANCD-YI021-E)的输入输出插头(CN306、307、308、309)的电线时,请参考CCX30&)貌字输出入连援髀血字楡 in 人连接 as症;铺时扎迪抵隰(OW5J栽审输歯&谨挟烬™((H)吐商谕出辻推能FE
E5A;2)外接实物图下图
电线请使用无屏蔽的双绞线
(电线一侧的插头及 1/0 端子台为选装件)违奧斟 A>【柏电逋门單下用CH⑥EEblvlQ|茁—卜耐 F唱陀鈕大披蔦汁适*1■忧;XIMPIL■咗:IIFs5S3tS[/