第二部分各章作业答案第一章绪论★1、机电一体化的基本概念和涵义是什么
★机电一体化的英文名词如何拼合
(P1)【参考答案】机电一体化是从系统的观点出发,将机械技术、微电子技术、信息技术、控制技术等在系统工程基础上有机地加以综合,实现整个机械系统最佳化而建立起来的一门新的科学技术
机电一体化在国外被称为 Mechatronics 是日本人在 20 世纪 70 年代初提出来的,它是用英文 Mechanics 的前半部分和 Electronics 的后半部分结合在一起构成的一个新词,意思是机械技术和电子技术的有机结合
★2、机电一体化的发展趋势包括哪几个方面
(P2)【参考答案】机电一体化的发展趋势可概况为以下三个方面:(4-3-2)(1)性能上,向高精度、高效率、高性能、智能化的方向发展;(2)功能上,向小型化、轻型化、多功能方向发展;(3)层次上,向系统化、复合集成化的方向发展
★3、一个较完善的机电一体化系统包括哪几个基本要素
★其核心部分是什么
(P4-P5)【参考答案】一个较完善的机电一体化系统应包括以下几个基本要素:机械本体、动力部分、检测部分、执行机构、控制器和接口
其核心部分是控制器
★4、什么是接口
接口的功能有哪些
(P5)【参考答案】为实现各子系统或要素之间物质、能量或信息交换而进行的连接就是接口
接口的基本功能有交换、放大、传递
5、机电一体化的相关技术有哪些
(P2-P4)【参考答案】机械技术、检测传感技术、信息处理技术、自动控制技术、伺服传动技术、系统总体技术
第二章机械传动与支承技术1、熟练掌握以数控机床进给传动为例说明机械传动系统建模的步骤、方法
重点在传动惯量折算的推导过程
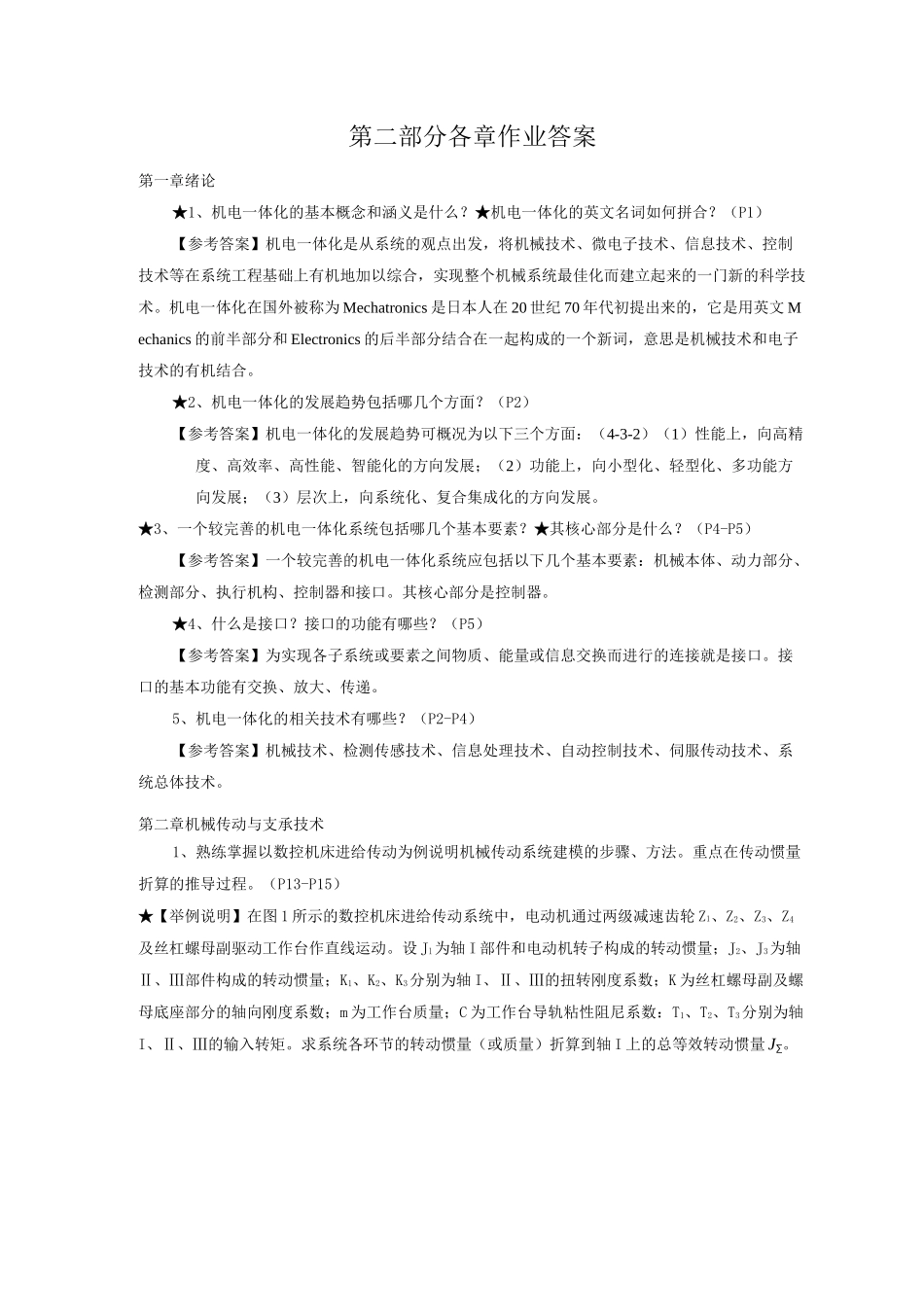
(P13-P15)★【举例说明】在图 1 所示的数控机床进给传动系统中,电动机通过两级减速齿轮 Z1、Z2、Z3、Z4及丝杠螺母副驱动工作台作直线运动
设 Jl为轴 I 部件