苏州市职业大学机械认知及分析实训项目报告课程名称: 机械设计 项目名称: HJ-J12F 大型铆钉机的认知及分析 专 业: 机械制造与自动化 班 级: 10 机制( 2 ) 姓 名: 陈路路、杨利、王涛、李明乐、刘洁 联系方式: 电话( 13901588888 ) QQ ( xxxxxxxxxx ) 指导教师: 郭南初 一、项目目的:1)、了解各种机械、机构的基本结构;2)、了解各种机械、机构的工作原理、特点、功能及应用;3)、掌握机构运动简图的绘制方法;4)、掌握机构自由度计算及运动分析方法;5)、熟练掌握 AutoCAD 绘图方法二、项目实施场时间:2010
8-2011
12三、项目实施场所:苏州圣宝利机械制造有限公司(教学工厂)四、项目实施:1、项目任务1)、参观教学工厂、选定自己感兴趣的机械,分析其组成、工作原理、运动形式
2)、以小组讨论绘的形式,分工负责,绘制选定机器主要执行机构的运动简图,进行机构自由度计算和运动分析
3)、现场测绘,画出机构的装配图、零件图,以便后续课程进行模型加工
2、选定机器,项目分工通过参观教学工厂的各类加工设备,选定 HJ-J12F 大型铆钉机作为本项目的研究对象
具体项目分工如下:序号负责人任 务1陈路路机构的结构及运动分析、项目报告2杨 利绘制零件图:薄垫片、厚垫片、冲杆、底座、手轮3王 涛绘制零件图:连杆 1、2、3、上连接块、下连接块4李明乐绘制零件图:心轴、转盘、支撑板、支撑角5刘 洁绘制装配图3、绘制执行机构运动简图HJ-J12F 大型铆钉机的动力方式为:气动;铆接方式分:径向铆接;主要应用于实心铆钉的铆接
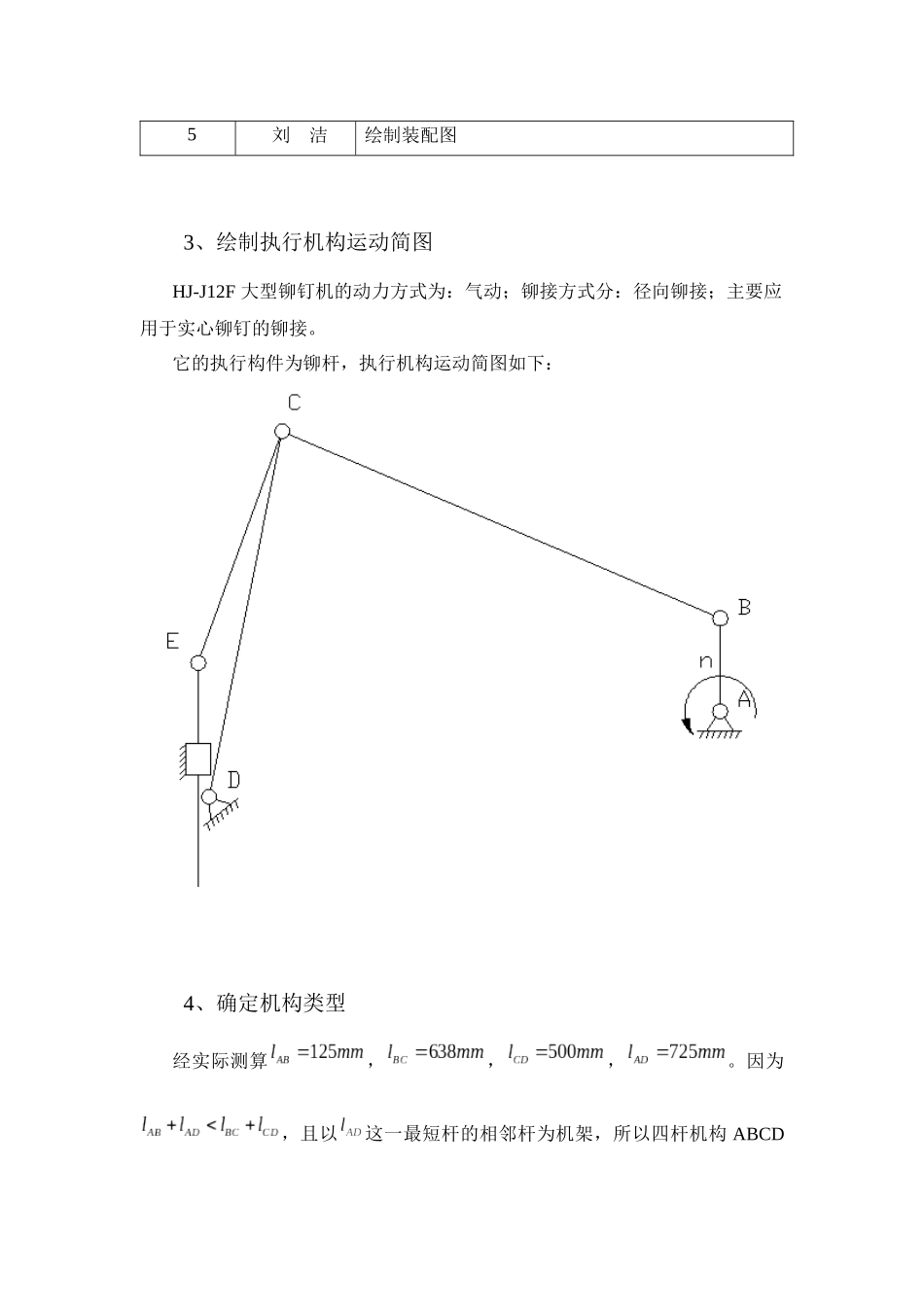
它的执行构件为铆杆,执行机构运动简图如下:4、确定机构类型经实际测算,,,
因为,且以这一最短杆的相邻杆为机架,所以四杆机构 ABCD为曲柄摇杆机构
在 C 点处接 RRPⅡ 级杆组
5、计算机构自由度考 虑