YYW-20T技术规范一、可平衡零件规格1
工件质量(包括平衡夹具)a
最小500Kgb
最大20000Kg2
每个支承座最大载荷10500Kg3
工件最大直径Φ2500mm4
工件轴径范围a
小滚轮组Φ50~Φ190mmb
中滚轮组Φ190~Φ300mmc
大滚轮组Φ300~Φ400mmd
大滚轮组Φ190~Φ300mm5
工件两支承间距离400~4400mm二、驱动主轴a
主轴电机:YVF2250M-4/B355KWb
平衡转速范围:100~1250r/min三、使用条件1
环境温度:-10~50℃2相对环境温度不超过85%3
电源:交流380V、50Hz,允许±10%的波动4
周围无强磁场及大的振动设备
变速器型号:QJ五档系列变速器QJ805
四、平衡精度1
最小可达剩余不平衡量:emar≤0
4gmm/Kg2
不平衡量减少率:URR≥95%
YYH-2000技术规范一、可平衡零件规格1
工件质量(包括平衡夹具)a
最小500Kgb
最大2000Kg2
每个支承座最大载荷1050Kg3
工件最大直径Φ1600mm4
工件轴径范围a
小滚轮组Φ15~Φ190mmb
中滚轮组Φ190~Φ290mm5
工件两支承间距离280~3100mm(圈带驱动)140~2250mm(联轴节驱动)二、驱动a
联轴节驱动电机:YVF2180L-4/B322KWb
圈带驱动电机:YVF2180L-4/B522KWc
平衡转速范围:100~1200r/min三、使用条件1
环境温度:-10~50℃2相对环境温度不超过85%3
电源:交流380V、50Hz,允许±10%的波动4
周围无强磁场及大的振动设备
四、平衡精度1
最小可达剩余不平衡量:emar≤0
2gmm/Kg2
不平衡量减少率:URR≥95%
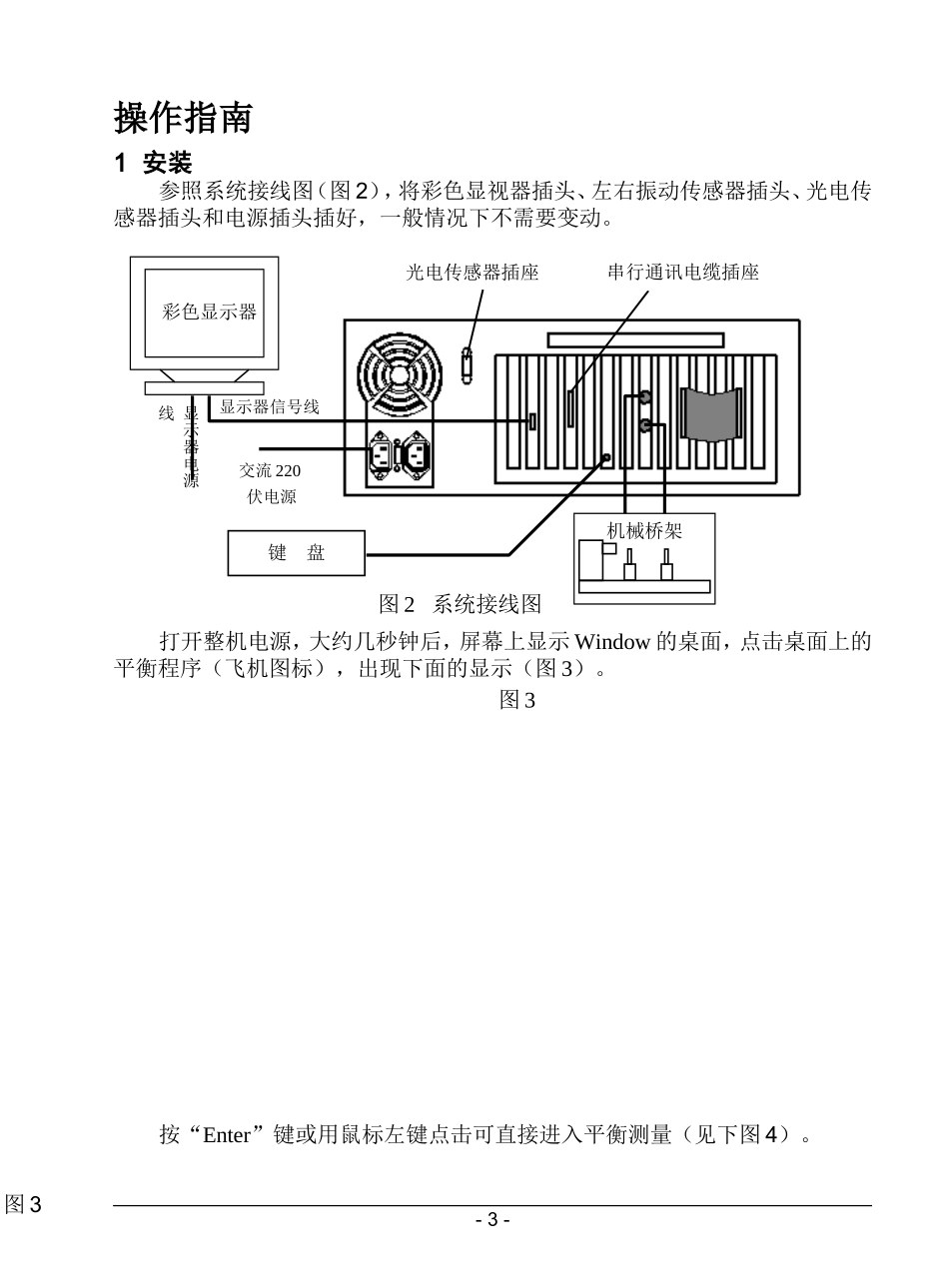
-2-操作指南1安装参照系统接线图(图2),将彩色显视器插头、左右振动传感器插头、光