内模控制 内模控制是一种基于过程数学模型进行控制器设计的新型控制策略
它与史,控制器设计可由过程模型直接求取
密斯预估控制很相似,有一个被称为内部模型的过程模型设计简单、控制性能好、鲁棒性强,并且便于系统分析
内模控制方法由 Garcia 和 Morari 于 1982 年首先正式提出
可以和许多其它控制方式相结合,如内模控制与神经网络、内模控制与模糊控制、内模控制和自适应控制、内模控制和最优控制、预测控制的结合使内模控制不断得到改进并广泛应用于工程实践中,取得了良好的效果
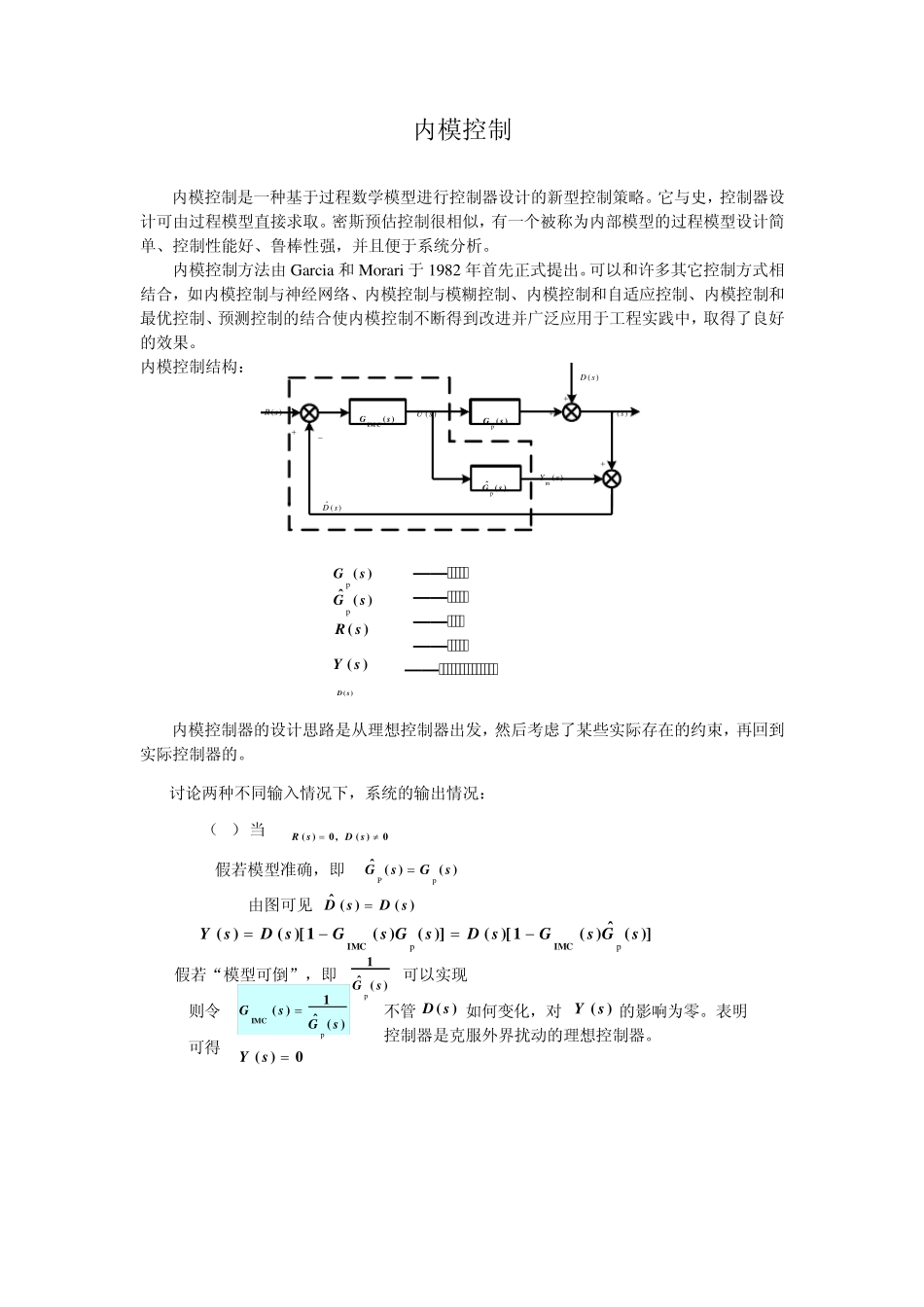
内模控制结构: 内模控制器的设计思路是从理想控制器出发,然后考虑了某些实际存在的约束,再回到实际控制器的
讨论两种不同输入情况下,系统的输出情况: (1)当 0)(,0)(sDsR假若模型准确,即 由图可见 )()(ˆsGsGpP)()(ˆsDsD)](ˆ)(1)[()]()(1)[()(IMCIMCsGsGsDsGsGsDsYpp假若“模型可倒”,即 可以实现 )(ˆ1sGp)(ˆ1)(IMCsGsGp0)(sY可得 不管 如何变化,对 的影响为零
表明控制器是克服外界扰动的理想控制器
则令 )( sD)( sY ——实际对象; ——对象模型; ——给定值; ——系统输出; ——在控制对象输出上叠加的扰动
)( sGp)(ˆsGp)( sR)( sY)( sD)(IM C sG)(sU)( sY)( sGp)(sR)(ˆsGp)(sD)(m sY)(ˆ sD (2)当 时: 0)(,0)(sRsD)()(ˆsGsGpP假若模型准确,即 0)(sD0)(ˆsD又因为 ,则 )()()()(ˆ1)()()()(IMCsRsRsGsGsRsGsGsYppp表明控制器是 跟踪 变化的理想控制器
)( sR)( sY当模型没有误差 )()]()(1[)